|
Basic Image AlgorithmS Library
2.8.0
|
|
Basic Image AlgorithmS Library
2.8.0
|
class representing the covariance matrix of a homogenous point 3D More...
#include <Base/Geometry/HomgPoint3DCov.hh>
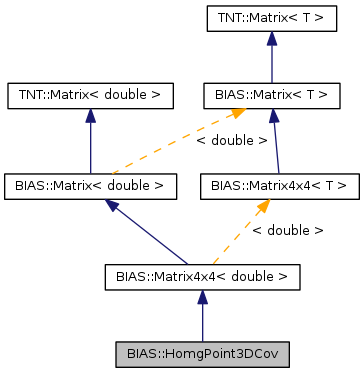
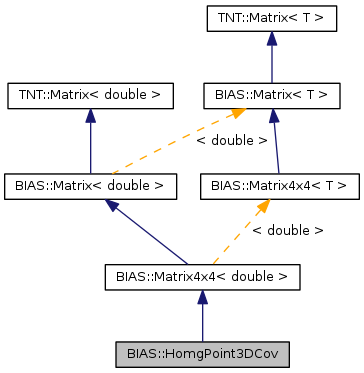
 Inheritance diagram for BIAS::HomgPoint3DCov: Collaboration diagram for BIAS::HomgPoint3DCov:
Inheritance diagram for BIAS::HomgPoint3DCov: Collaboration diagram for BIAS::HomgPoint3DCov:Public Types | |
| typedef const T * | const_iterator |
| typedef const T & | const_reference |
| typedef T | element_type |
| typedef T * | iterator |
| typedef T * | pointer |
| typedef T & | reference |
| typedef Subscript | size_type |
| typedef T | value_type |
Public Member Functions | |
| void | AbsIP () |
| absolute values of all elements of the matrix (in place) More... | |
| Matrix< double > | Adjoint () const |
| computes the adjoint matrix More... | |
| void | clear () |
| stl conform interface More... | |
| double | det () const |
| calculate the determinant recursively using sub matrices of size 3x3 More... | |
| Subscript | dim (Subscript d) const |
| void | GaussJordan () |
| use the Gauss Jordan Algrithm to transform the matrix to reduced row echelon form. More... | |
| Matrix3x3< double > | GetEuclidean () const |
| Matrix< double > | GetMax (Matrix< double > &m) |
| returns an matrix the same size as the matrix n and m with the largest elements taken from n or m More... | |
| Matrix< double > | GetMin (Matrix< double > &m) |
| returns an matrix the same size as the matrix n and m with the smallest elements taken from n or m More... | |
| HomgPoint3DCov () | |
| HomgPoint3DCov (const MatrixInitType &i) | |
| HomgPoint3DCov (const Matrix3x3< double > &m) | |
| HomgPoint3DCov (const Matrix4x4< double > &m) | |
| HomgPoint3DCov (const Matrix< double > &m) | |
| HomgPoint3DCov (const TNT::Matrix< double > &m) | |
| void | Homogenize (HomgPoint3D &p) |
| homogenizes p and *this More... | |
| initialize (M, N) | |
| bool | IsHomogenized () const |
| bool | IsIdentity (double eps=0.0) const |
| Checks if the matrix a an identity. More... | |
| bool | IsZero () const |
| bool | IsZero (double eps=0.0) const |
| Checks if the matrix is a null matrix. More... | |
| void | Kronecker (Matrix< double > const B, Matrix< double > &dest) const |
| Kronecker-product with matrix, result in dest. More... | |
| Subscript | lbound () const |
| void | Mult (const Vector4< double > &argvec, Vector4< double > &destvec) const |
matrix - vector multiplicate this matrix with Vector4, storing the result in destvec, calculates: destvec = (this Matrix) * argvec More... | |
| void | Mult (const Matrix4x4< double > &argmat, Matrix4x4< double > &destmat) const |
matrix-matrix multiplication with other Matrix4x4, storing the result in destmat using 'manual inlining' More... | |
| Matrix< T > & | newsize (Subscript M, Subscript N) |
| Matrix4x4 & | newsize (int rows, int cols) |
just neccessary to avoid resizing of this 'fixed size' matrix because it is derived from the resizable Matrix Should be removed if Matrix4x4 becomes a base class. More... | |
| Subscript | num_cols () const |
| Subscript | num_rows () const |
| reference | operator() (Subscript i) |
| const_reference | operator() (Subscript i) const |
| reference | operator() (Subscript i, Subscript j) |
| const_reference | operator() (Subscript i, Subscript j) const |
| T * | operator[] (Subscript i) |
| const T * | operator[] (Subscript i) const |
| std::ostream & | Print (std::ostream &s, const int width, const int precision, bool scientific=true) const |
| std::ostream & | Print (std::ostream &s, const bool intCastOutput=false, const bool binaryOutput=false, const bool forceFullPrecision=false) const |
| std::ostream & | PrintPretty (std::ostream &s, const std::string &name="", const int width=8, const bool alignLeft=true) const |
| std::istream & | Read (std::istream &s, const bool intCastInput=false, const bool binaryInput=false) |
| JW. More... | |
| set (value) | |
| void | SetEuclidean (const Matrix3x3< double > &m) |
| void | SetIdentity () |
set the elements of this matrix to the identity matrix (posisbly overriding the inherited method) More... | |
| Subscript | size () const |
| void | SwapRows (const int i, const int r) |
| swaps two rows More... | |
| Matrix4x4 | Transpose () const |
| void | TransposeIP () |
tranpose this matrix "in place" example: 0 1 2 3 –> 0 4 8 12 4 5 6 7 –> 1 5 9 13 8 9 10 11 –> 2 6 10 14 12 13 14 15 –> 3 7 11 15 More... | |
| void | Vec (Vector< double > &dest) const |
| vec-operator returns the elements of the matrix columwise as vector More... | |
| virtual | ~HomgPoint3DCov () |
Arithmetic | |
| void | Mult (const Matrix< double > &arg, Matrix< double > &result) const |
| matrix multiplication, result is not allocated More... | |
| void | Mult (const Matrix< double > &arg) |
| in Place matrix multiplication this is equal to M = M * arg, but faster More... | |
| void | Mult (const Vector< double > &arg, Vector< double > &result) const |
| matrix vector multiplication, result is not allocated More... | |
| void | AddIP (const double &scalar) |
| in place addition function More... | |
| void | AddIP (const Matrix< double > &arg) |
| Adds arg to this. More... | |
| void | SubIP (const Matrix< double > &arg) |
| Subtracts arg from this this -= arg. More... | |
| void | SubIP (const double &scalar) |
| in place subtraction function More... | |
| void | Add (const double &scalar, Matrix< double > &dest) const |
| addition function, storing data destination matrix More... | |
| void | Sub (const double &scalar, Matrix< double > &dest) const |
| substraction function, storing data destination matrix More... | |
| void | MultiplyIP (const double &scalar) |
| in place multiplication function More... | |
| void | Multiply (const double &scalar, Matrix< double > &dest) const |
| multiplication function, storing data destination matrix More... | |
| void | MultLeft (const Matrix< double > &arg) |
| in Place matrix multiplication this is equal to M = arg*M, but faster More... | |
| void | MultLeft (const Vector< double > &arg, Vector< double > &result) const |
| vector matrix multiplication result=arg*this. More... | |
| void | MultiplyWithTransposeOf (const Matrix< double > &arg, Matrix< double > &result) const |
| matrix matrix multiplication for multiplication with the transpose of the given matrix, result=this*arg^T. More... | |
| void | DivideIP (const double &scalar) |
| in place division function More... | |
| void | Divide (const double &scalar, Matrix< double > &dest) const |
| division function, storing data destination matrix More... | |
| void | DivideElementwise (const Matrix< double > &arg) |
| elementwise division function in place More... | |
| void | GetSystemMatrix (Matrix< double > &dest) const |
| compute square system matrix dest = A^T * A More... | |
Get Functions | |
| double | GetMax () const |
| Returns the maximum value of the matrix elements. More... | |
| double | GetMin () const |
| Returns the minimum value of the matrix elements. More... | |
| double * | GetData () |
| get the pointer to the data array of the matrix (for faster direct memeory access) More... | |
| const double * | GetData () const |
| const double ** | GetDataArray () const |
| returns zero based arry for data access More... | |
| double ** | GetDataArray () |
| double ** | GetDataArray1 () const |
| returns 1 based array to data access More... | |
| unsigned int | GetRows () const |
| unsigned int | GetCols () const |
| const double * | GetDataLast () const |
| Get a pointer to the last data element Do not use this on unitilized matrices with <= on pointers because on an unitilized matrix GetData() will be NULL and last Element < (typically FFFFF8) We don't want an if here for performance reasons of the innerst loop. More... | |
| double * | GetDataLast () |
| Vector< double > | GetRow (const int &row) const |
| return a copy of row "row" of this matrix, zero based counting More... | |
| Vector< double > | GetCol (const int &col) const |
| return a copy of column "col", zero based counting More... | |
| void | GetSubMatrix (const size_t startRow, const size_t startCol, const size_t numRows, const size_t numCols, Matrix< double > &submatrix) const |
| return a submatrix from this. More... | |
| void | GetSubMatrix (const Vector< int > &rows, const Vector< int > &cols, Matrix< double > &submatrix) const |
| return a submatrix from this. More... | |
| Matrix< double > | GetSubMatrix (const Vector< int > &rows, const Vector< int > &cols) const |
| return a submatrix from this. More... | |
| void | SetSubMatrix (const size_t startRowInThis, const size_t startColInThis, const Matrix< double > &submatrix, const size_t startRowInSub, const size_t startColInSub, const size_t numRows, const size_t numCols) |
| sets a submatrix in this. More... | |
| void | SetSubMatrix (const size_t startRowInThis, const size_t startColInThis, const Matrix3x3< double > &submatrix) |
| sets a 3x3 submatrix in this. More... | |
| void | SetSubMatrix (const size_t startRowInThis, const size_t startColInThis, const Vector3< double > &subvector) |
| sets a 3x1 submatrix in this. More... | |
| void | SetRow (const int row, const Vector< double > &data) |
| set a row of matrix from vector More... | |
| void | SetCol (const int row, const Vector< double > &data) |
| set a col of matrix from vector More... | |
| void | Set (const int row, const int col, const Matrix< double > &data) |
| Copies the contents of data into this at the position indicated by row and col. More... | |
| void | Set (const int row, const int col, const Vector< double > &data) |
| Copies the contents of data into this at the position indicated by row and col. More... | |
| void | SetTranspose (const int row, const int col, const Vector< double > &data) |
| Copies the contents of data into this at the position indicated by row and col. More... | |
| int | GetNumElements () const |
| Returns the total number of elements. More... | |
| void | GetMaxMin (double &max, double &min) const |
| return biggest and smallest entry More... | |
| void | GetAbsMaxMin (double &max, double &min) const |
| return biggest and smallest absolute values More... | |
| double | GetMean () const |
| Returns the mean value of the matrix elements. More... | |
| double | NormL1 () const |
| Return the L1 norm: |a| + |b| + |c| + ... More... | |
| double | NormL2 () const |
| Return the L2 norm: a^2 + b^2 + c^2 + ... More... | |
| double | NormFrobenius () const |
| Return Frobenius norm = sqrt(trace(A^t * A)). More... | |
| double | Trace () const |
| double | DetSquare () const |
Set Functions | |
| void | SetZero () |
| Sets all values to zero. More... | |
| void | MakeSymmetric () |
| componentwise: this = 0.5(this + this^T) yields symmetric matrix only allowed for square shaped matrices More... | |
| void | Fill (const double &scalar) |
| Takes the elements of a Vector and put them as diagonal elements into a matrix. More... | |
Scaling and Normalization | |
| void | NormalizeColsToOne (const int norm_row_index) |
| divides each column of the matrix through the element norm_row_index. More... | |
| void | NormalizeRowsToOne (const int norm_col_index) |
| divides each row of the matrix through the element norm_col_index. More... | |
| void | NormalizeRows () |
| Normalizes each row to L2 norm one. More... | |
| void | NormalizeCols () |
| Normalizes each coloumn to L_2 norm one. More... | |
| double | Normalize () |
| Normalizes the matrix by the entry with the biggest absolute value by dividing all elements with this one. More... | |
| void | ScaleRow (int NoRow, doublescale) |
| Scales row NoRow with scale. More... | |
| void | ScaleCol (int NoCol, doublescale) |
| Scales column NoCol with scale. More... | |
Input / Output | |
| bool | Load (const std::string &filename) |
| method to load directly from a given filename. More... | |
| bool | Save (const std::string &filename) const |
| method to save directly to a given filename. More... | |
| int | WriteMatlab (std::ostream &ostr, const std::string &name) const |
| Write the matrix in Matlab format to the given stream. More... | |
| bool | BinRead (const char *filename) const |
| This method reads a matrix from a given file in binary format. More... | |
| bool | BinWrite (const char *filename) const |
| This method writes a matrix to a given file in binary format. More... | |
Protected Member Functions | |
| bool | CheckSymmetry_ () const |
| void | copy (const T *v) |
| void | destroy () |
| void | initialize (Subscript M, Subscript N) |
| void | MakeSymmetric_ () |
| void | set (const T &val) |
Protected Attributes | |
| Subscript | m_ |
| Subscript | mn_ |
| Subscript | n_ |
| T ** | row_ |
| T ** | rowm1_ |
| T * | v_ |
| T * | vm1_ |
Related Functions | |
(Note that these are not member functions.) | |
| template<class T > | |
| Matrix< T > | operator* (const Matrix< T > &A, const Matrix< T > &B) |
| template<class T > | |
| Vector< T > | operator* (const Matrix< T > &A, const Vector< T > &x) |
| template<class T > | |
| Matrix< T > | operator+ (const Matrix< T > &A, const Matrix< T > &B) |
| template<class T > | |
| Matrix< T > | operator- (const Matrix< T > &A, const Matrix< T > &B) |
| std::ostream & | operator<< (std::ostream &s, const Matrix< char > &A) |
| std::ostream & | operator<< (std::ostream &s, const Matrix< unsigned char > &A) |
| template<class T > | |
| std::ostream & | operator<< (std::ostream &s, const Matrix< T > &A) |
| std::istream & | operator>> (std::istream &s, Matrix< unsigned char > &A) |
| std::istream & | operator>> (std::istream &s, Matrix< char > &A) |
| template<class T > | |
| std::istream & | operator>> (std::istream &s, Matrix< T > &A) |
class representing the covariance matrix of a homogenous point 3D
Definition at line 41 of file HomgPoint3DCov.hh.
|
inherited |
|
inherited |
|
inherited |
|
inherited |
|
inherited |
|
inherited |
|
inherited |
|
inherited |
| HomgPoint3DCov::HomgPoint3DCov | ( | ) |
Definition at line 35 of file HomgPoint3DCov.cpp.
| HomgPoint3DCov::HomgPoint3DCov | ( | const MatrixInitType & | i | ) |
Definition at line 40 of file HomgPoint3DCov.cpp.
| HomgPoint3DCov::HomgPoint3DCov | ( | const Matrix3x3< double > & | m | ) |
Definition at line 44 of file HomgPoint3DCov.cpp.
References SetEuclidean().
| HomgPoint3DCov::HomgPoint3DCov | ( | const Matrix4x4< double > & | m | ) |
Definition at line 51 of file HomgPoint3DCov.cpp.
References CheckSymmetry_(), and MakeSymmetric_().
| HomgPoint3DCov::HomgPoint3DCov | ( | const Matrix< double > & | m | ) |
Definition at line 65 of file HomgPoint3DCov.cpp.
References CheckSymmetry_(), and MakeSymmetric_().
| HomgPoint3DCov::HomgPoint3DCov | ( | const TNT::Matrix< double > & | m | ) |
Definition at line 75 of file HomgPoint3DCov.cpp.
References CheckSymmetry_(), and MakeSymmetric_().
|
virtual |
Definition at line 86 of file HomgPoint3DCov.cpp.
|
inherited |
absolute values of all elements of the matrix (in place)
|
inlineinherited |
addition function, storing data destination matrix
implementation
|
inlineinherited |
|
inlineinherited |
Adds arg to this.
|
inlineinherited |
computes the adjoint matrix
|
inherited |
This method reads a matrix from a given file in binary format.
The file is not human read-/editable but provides full precision. A dimension check is performed.
|
inherited |
This method writes a matrix to a given file in binary format.
The file is not human read-/editable but provides full precision.
|
inlineprotected |
Definition at line 85 of file HomgPoint3DCov.hh.
References BIAS::Equal().
Referenced by HomgPoint3DCov(), and SetEuclidean().
|
inlinevirtualinherited |
stl conform interface
Reimplemented from BIAS::Matrix< double >.
Definition at line 281 of file Matrix4x4.hh.
|
inlineprotectedinherited |
Definition at line 122 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=().
|
inlineprotectedinherited |
Definition at line 181 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::newsize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::~Matrix().
|
inlineinherited |
calculate the determinant recursively using sub matrices of size 3x3
Definition at line 164 of file Matrix4x4.hh.
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
division function, storing data destination matrix
|
inlineinherited |
elementwise division function in place
|
inlineinherited |
|
inherited |
Takes the elements of a Vector and put them as diagonal elements into a matrix.
The size of this Vector must be exactly min( matrix.width, matrix.height). Optionally all other elements may be set to zero
| zero_others | Must be true, if all non-diagonal elements shall be set to zero |
|
inherited |
use the Gauss Jordan Algrithm to transform the matrix to reduced row echelon form.
|
inherited |
return biggest and smallest absolute values
|
inherited |
return a copy of column "col", zero based counting
|
inlineinherited |
|
inlineinherited |
get the pointer to the data array of the matrix (for faster direct memeory access)
the order of the data is linewise, which means an elemnt sequence of e.g. [0] = M(0,0) [1] = M(0,1) [2] = M(0,2) [3] = M(1,0) // next line [4] = M(1,1) ...
Definition at line 185 of file Matrix.hh.
Referenced by BIAS::EuclideanTransf3D::Set().
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
Get a pointer to the last data element Do not use this on unitilized matrices with <= on pointers because on an unitilized matrix GetData() will be NULL and last Element < (typically FFFFF8) We don't want an if here for performance reasons of the innerst loop.
|
inlineinherited |
| Matrix3x3< double > HomgPoint3DCov::GetEuclidean | ( | ) | const |
Definition at line 113 of file HomgPoint3DCov.cpp.
References IsHomogenized().
|
inherited |
returns an matrix the same size as the matrix n and m with the largest elements taken from n or m
|
inherited |
Returns the maximum value of the matrix elements.
|
inherited |
return biggest and smallest entry
|
inherited |
Returns the mean value of the matrix elements.
|
inherited |
returns an matrix the same size as the matrix n and m with the smallest elements taken from n or m
|
inherited |
Returns the minimum value of the matrix elements.
|
inlineinherited |
|
inherited |
return a copy of row "row" of this matrix, zero based counting
|
inlineinherited |
|
inherited |
return a submatrix from this.
Start index is [startRow][startCol] end index is [startRow+numRows-1][startCol+numCols-1]. submatrix is resized to numRows/numCols if necessary.
|
inherited |
return a submatrix from this.
Similar to matlab notation (except indexing, starts with 0 of course!). Vectors rows = '1 3' and cols = '1 2' for matrix: / 1 2 3 \ | 4 5 6 | \ 7 8 9 / results in: / 1 2 \ \ 7 8 / Matrix has to be initialized!!!
|
inherited |
return a submatrix from this.
Similar to matlab notation (except indexing, starts with 0 of course!), see GetSubMatrix(const Vector<int> &rows, const Vector<int> &cols, Matrix<T> &submatrix)
|
inlineinherited |
compute square system matrix dest = A^T * A
| dest | holds result of this->Transpose * this |
If you want to solve A * x = b, where A has more rows than columns, a common technique is to solve x = (A^T * A)^-1 * A^T * b. This function provides a fast way to compute A^T*A from A.
| void HomgPoint3DCov::Homogenize | ( | HomgPoint3D & | p | ) |
homogenizes p and *this
Definition at line 90 of file HomgPoint3DCov.cpp.
References BIAS::HomgPoint3D::Homogenize(), BIAS::HomgPoint3D::IsAtInfinity(), BIAS::MatrixZero, and BIAS::Matrix4x4< T >::Transpose().
Referenced by BIAS::CovMatrix3x3::SetFromHomogenized().
|
inlineprotectedinherited |
Definition at line 95 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), TNT::Matrix< BIAS::BIAS::Vector< int > >::newsize(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=().
|
inherited |
|
inline |
Definition at line 67 of file HomgPoint3DCov.hh.
References BIAS::Equal().
Referenced by GetEuclidean(), and BIAS::Covariance3Dto2DHomg::Project().
|
inherited |
Checks if the matrix a an identity.
I.e. all elements with index i==j are equal 1 and all others are zero.
|
inline |
Definition at line 74 of file HomgPoint3DCov.hh.
References BIAS::Equal().
|
inherited |
Checks if the matrix is a null matrix.
|
inherited |
Kronecker-product with matrix, result in dest.
Kronecker-product with matrix B, result in dest.
|
inlineinherited |
|
inherited |
method to load directly from a given filename.
internally using stream operator
|
inlineinherited |
componentwise: this = 0.5(this + this^T) yields symmetric matrix only allowed for square shaped matrices
|
inlineprotected |
Definition at line 93 of file HomgPoint3DCov.hh.
Referenced by HomgPoint3DCov(), and SetEuclidean().
|
inlineinherited |
matrix - vector multiplicate this matrix with Vector4,
storing the result in destvec, calculates: destvec = (this Matrix) * argvec
Definition at line 121 of file Matrix4x4.hh.
|
inlineinherited |
matrix-matrix multiplication with other Matrix4x4,
storing the result in destmat using 'manual inlining'
Definition at line 190 of file Matrix4x4.hh.
|
inlineinherited |
matrix multiplication, result is not allocated
|
inlineinherited |
in Place matrix multiplication this is equal to M = M * arg, but faster
|
inlineinherited |
matrix vector multiplication, result is not allocated
|
inlineinherited |
multiplication function, storing data destination matrix
|
inlineinherited |
|
inlineinherited |
matrix matrix multiplication for multiplication with the transpose of the given matrix, result=this*arg^T.
|
inlineinherited |
in Place matrix multiplication this is equal to M = arg*M, but faster
|
inlineinherited |
vector matrix multiplication result=arg*this.
|
inlineinherited |
Definition at line 269 of file cmat.h.
Referenced by BIAS::Matrix< T >::Add(), BIAS::RegionMatcher::BilinearRegion(), BIAS::RegionMatcher::BilinearRegionColor3(), BIAS::ComputeCovariance(), BIAS::LDA::ComputeReductionMatrix(), BIAS::PCA::ComputeReductionMatrix(), BIAS::ContourBSplineShapeMatrix::ComputeRegularisationMatrix(), BIAS::ContourBSplineData::ComputeSplineMetricMatrix_(), BIAS::Matrix< T >::Conv(), BIAS::CamPoseCalib::CreateSecDMatrix_(), BIAS::Matrix< T >::Divide(), Eigenproblem_quadratic_matrix(), BIAS::CamPoseCalib::Estimate(), BIAS::TrackerBaseAffine< StorageType >::EvaluateResult_(), BIAS::TrackerBaseAffine2< StorageType >::EvaluateResult_(), BIAS::TrackerBaseInterface< StorageType >::EvaluateResult_(), BIAS::TrackerBaseInterface< StorageType >::Filter_ByMask(), BIAS::TrackerBaseInterface< StorageType >::Filter_BySeparableMask(), BIAS::TrackerBaseInterface< StorageType >::Filter_GradXSobel3x3(), BIAS::TrackerBaseInterface< StorageType >::Filter_GradYSobel3x3(), BIAS::TrackerBaseInterface< StorageType >::FilterLowpass_Binomial3x3(), BIAS::TrackerBaseInterface< StorageType >::FilterLowpass_ByMask(), BIAS::TrackerBaseInterface< StorageType >::FilterLowpass_BySeparableMask(), Fortran_Matrix_to_Matrix(), generalised_eigenvalue_matrix_solve(), BIAS::LDA::GenerateRandomTestData(), BIAS::SparseMatrix::GetAsDense(), BIAS::Random::GetMeanAndCovariance(), BIAS::PMatrixLinear::GetPEstSystemHom(), BIAS::PMatrixLinear::GetPEstSystemInHom(), BIAS::Matrix< T >::GetSystemMatrix(), BIAS::Kalman::Init(), BIAS::IteratedExtendedKalman::Init(), BIAS::SparseMatrix::Invert(), BIAS::SparseMatrix::InvertAndSolve(), BIAS::Matrix< T >::Kronecker(), Lapack_Cholesky_SymmetricPositiveDefinit(), BIAS::RegionMatcher::LinearRegionX(), BIAS::LevenbergMarquardtBase::LM_Compute(), BIAS::LevenbergMarquardtBase::LM_ComputeWithoutJacobian(), TNT::matmult(), BIAS::Matrix< T >::Mult(), BIAS::Matrix< T >::Multiply(), BIAS::Matrix< T >::MultiplyWithTransposeOf(), BIAS::MxArrToBIASMatrix(), BIAS::Matrix3x4< T >::newsize(), BIAS::Matrix4x4< T >::newsize(), BIAS::TextureTransformHomography::ParameterInversionJacobian(), BIAS::TextureTransformAffine::ParameterInversionJacobian(), BIAS::TextureTransformDisparity::ParameterInversionJacobian(), BIAS::TextureTransformDisplacement::ParameterInversionJacobian(), BIAS::TextureTransformRotation::ParameterInversionJacobian(), BIAS::TextureTransformEuclidian::ParameterInversionJacobian(), BIAS::TextureTransformHomography::ParameterJacobianBackward(), BIAS::TextureTransformAffine::ParameterJacobianBackward(), BIAS::TextureTransformDisparity::ParameterJacobianBackward(), BIAS::TextureTransformDisplacement::ParameterJacobianBackward(), BIAS::TextureTransformRotation::ParameterJacobianBackward(), BIAS::TextureTransformEuclidian::ParameterJacobianBackward(), BIAS::TextureTransformSimilar::ParameterJacobianBackward(), BIAS::TextureTransform::ParameterJacobianBackward(), BIAS::TextureTransformAffine::ParameterJacobianForward(), BIAS::TextureTransformHomography::ParameterJacobianForward(), BIAS::TextureTransformDisparity::ParameterJacobianForward(), BIAS::TextureTransformDisplacement::ParameterJacobianForward(), BIAS::TextureTransformRotation::ParameterJacobianForward(), BIAS::TextureTransformSimilar::ParameterJacobianForward(), BIAS::TextureTransformEuclidian::ParameterJacobianForward(), BIAS::TextureTransform::ParameterJacobianForward(), BIAS::IteratedExtendedKalman::Predict(), BIAS::Covariance3Dto2D::Project(), BIAS::Covariance3Dto2DHomg::Project(), BIAS::QRFrac(), BIAS::RegionMatcher::RegionMatcher(), BIAS::ContourBSplineShapeMatrix::SetShapeSpaceEuclidian(), BIAS::ContourBSplineShapeMatrix::SetShapeSpaceIdentity(), BIAS::ContourBSplineShapeMatrix::SetShapeSpaceMatrix(), BIAS::ContourBSplineShapeMatrix::SetShapeSpacePlanarAffin(), BIAS::ContourBSplineShapeMatrix::SetSubShapeSpaceZero(), BIAS::Matrix< T >::Sub(), BIAS::TrackerBaseAffine< StorageType >::TrackAffine_(), BIAS::MonteCarloTransform::Transform(), BIAS::UnscentedTransform::Transform(), BIAS::IteratedExtendedKalman::Update(), and BIAS::Tracker< StorageType, CalculationType >::Vector2FilterMask_().
|
inherited |
just neccessary to avoid resizing of this 'fixed size' matrix because it is derived from the resizable Matrix
Should be removed if Matrix4x4 becomes a base class.
(04/17/2002) Jan Woetzel
|
inherited |
Normalizes the matrix by the entry with the biggest absolute value by dividing all elements with this one.
|
inherited |
Normalizes each coloumn to L_2 norm one.
Attention each column is normaized by its own scale!
|
inherited |
divides each column of the matrix through the element norm_row_index.
index runs [0..num_rows-1] for example: 2 3 4 5 normalized with row '1' will be 2/4 3/5 1 1
|
inherited |
Normalizes each row to L2 norm one.
Attention each row is normaized by its own scale!
|
inherited |
divides each row of the matrix through the element norm_col_index.
index runs [0..num_cols-1] for example: 2 3 4 5 normalized with row '1' will be 2/3 1 4/5 1
|
inlineinherited |
Return Frobenius norm = sqrt(trace(A^t * A)).
this method is deprecated because it is equivalent to NormL2
This function is deprecated, because it is equivalent to NormL2.
|
inlineinherited |
Return the L1 norm: |a| + |b| + |c| + ...
|
inlineinherited |
Return the L2 norm: a^2 + b^2 + c^2 + ...
|
inlineinherited |
Definition at line 320 of file cmat.h.
Referenced by BIAS::Matrix< T >::Add(), BIAS::Matrix< T >::AddIP(), BIAS::ImageAlignment::Align(), BIAS::CamPoseCalib::ApplyCoVariances_(), BIAS::ImageAlignment::AutoAlign(), BIAS::TFTensorEstimation::Compute(), BIAS::SVD3x3::Compute(), BIAS::GaussHelmert::ComputeNormalSystem_(), BIAS::LDA::ComputeReductionMatrix(), BIAS::PCA::ComputeReductionMatrix(), BIAS::ContourBSplineShapeMatrix::ComputeRegularisationMatrix(), BIAS::PCA::ComputeScatter(), BIAS::UnscentedTransform::ComputeSigmaPoints_(), BIAS::LDA::ComputeWithinAndInterClassCovs(), BIAS::Matrix< T >::Conv(), BIAS::Matrix< T >::Divide(), BIAS::Matrix< T >::DivideElementwise(), Eigenproblem_quadratic_matrix(), Eigenvalue_solve(), BIAS::CamPoseCalib::Estimate(), Fortran_Matrix_to_Matrix(), General_singular_value_decomposition(), generalised_eigenvalue_matrix_solve(), BIAS::CamPoseCalib::GetCov(), BIAS::CamPoseCalib::GetCoVarMatrix(), BIAS::SVD::GetNullvector(), BIAS::Matrix< T >::Kronecker(), Lapack_Cholesky_SymmetricPositiveDefinit(), Lapack_LLS_QR_linear_solve(), Lapack_LU_linear_solve(), Lapack_WLLS_solve(), TNT::matmult(), BIAS::Matrix2x2< T >::Matrix2x2(), BIAS::Matrix3x3< T >::Matrix3x3(), BIAS::Matrix4x4< T >::Matrix4x4(), BIAS::Matrix< T >::Mult(), TNT::mult_element(), BIAS::Matrix< T >::Multiply(), BIAS::Matrix< T >::MultiplyWithTransposeOf(), TNT::Matrix< BIAS::BIAS::Vector< int > >::newsize(), BIAS::TrackerBaseInterface< StorageType >::NormalizeRegion_(), BIAS::Vector< T >::operator*(), BIAS::Vector3< T >::operator*(), BIAS::Vector4< T >::operator*(), TNT::Matrix< T >::operator+(), TNT::Matrix< T >::operator-(), BIAS::Matrix3x4< T >::operator=(), BIAS::Matrix4x4< T >::operator=(), BIAS::PMatrix::PMatrix(), BIAS::PMatrixBase::PMatrixBase(), BIAS::CovTransformPose::PoseEulerZYXToQuat(), BIAS::CovTransformPose::PoseQuatToEulerZYX(), BIAS::IteratedExtendedKalman::Predict(), BIAS::Covariance3Dto2DHomg::Project(), BIAS::RMatrix::RMatrix(), BIAS::RMatrixBase::RMatrixBase(), BIAS::Matrix< T >::Set(), BIAS::RParametrization::SetCovarianceMatrix(), BIAS::PoseParametrization::SetCovarianceMatrix(), BIAS::EParametrization::SetCovarianceMatrix(), BIAS::LocalAffineFrame::SetFromMatrix(), BIAS::IteratedExtendedKalman::SetProcessCov(), BIAS::ContourBSplineShapeMatrix::SetShapeSpaceMatrix(), BIAS::IteratedExtendedKalman::SetState(), BIAS::ContourBSplineShapeMatrix::SetSubShapeSpaceZero(), BIAS::GaussHelmert::Solve(), BIAS::LeastSquaresSVD::Solve(), BIAS::SVD::Solve(), BIAS::CamPoseCalib::SolveLM_(), BIAS::ImageAlignment::StrictPyramidAlign(), BIAS::Matrix< T >::Sub(), BIAS::Matrix< T >::SubIP(), BIAS::SymmetricMatrix3x3< T >::SymmetricMatrix3x3(), BIAS::TrackerBaseAffine< StorageType >::TrackAffine_(), BIAS::MonteCarloTransform::Transform(), BIAS::UnscentedTransform::Transform(), BIAS::CovTransformPose::TransformPoint3D(), BIAS::CovTransformPose::TransformPose(), TNT::transpose(), BIAS::Kalman::Update(), BIAS::IteratedExtendedKalman::Update(), and Upper_symmetric_eigenvalue_solve().
|
inlineinherited |
Definition at line 319 of file cmat.h.
Referenced by BIAS::Matrix< T >::Add(), BIAS::Matrix< T >::AddIP(), BIAS::ImageAlignment::Align(), BIAS::ImageAlignment::AutoAlign(), BIAS::SVD3x3::Compute(), BIAS::ImageBlender::ComputeCylCamGeometry(), BIAS::ImageBlenderIncremental::ComputeCylCamGeometry_(), BIAS::LDA::ComputeReductionMatrix(), BIAS::PCA::ComputeReductionMatrix(), BIAS::ContourBSplineShapeMatrix::ComputeRegularisationMatrix(), BIAS::PCA::ComputeScatter(), BIAS::UnscentedTransform::ComputeSigmaPoints_(), BIAS::LDA::ComputeWithinAndInterClassCovs(), BIAS::Matrix< T >::Conv(), BIAS::Matrix< T >::Divide(), BIAS::Matrix< T >::DivideElementwise(), Eigenproblem_quadratic_matrix(), Eigenvalue_solve(), BIAS::CamPoseCalib::Estimate(), Fortran_Matrix_to_Matrix(), General_singular_value_decomposition(), generalised_eigenvalue_matrix_solve(), BIAS::CamPoseCalib::GetCov(), BIAS::CamPoseCalib::GetCoVarMatrix(), BIAS::SVD::GetLeftNullvector(), BIAS::Kalman::Init(), BIAS::IteratedExtendedKalman::Init(), BIAS::Matrix< T >::Kronecker(), Lapack_Cholesky_SymmetricPositiveDefinit(), Lapack_LLS_QR_linear_solve(), Lapack_LU_linear_solve(), Lapack_WLLS_solve(), TNT::matmult(), BIAS::Matrix2x2< T >::Matrix2x2(), BIAS::Matrix3x3< T >::Matrix3x3(), BIAS::Matrix4x4< T >::Matrix4x4(), BIAS::Matrix< T >::Mult(), TNT::mult_element(), BIAS::Matrix< T >::Multiply(), BIAS::Matrix< T >::MultiplyWithTransposeOf(), BIAS::Matrix< T >::MultLeft(), TNT::Matrix< BIAS::BIAS::Vector< int > >::newsize(), BIAS::TrackerBaseInterface< StorageType >::NormalizeRegion_(), BIAS::Vector< T >::operator*(), BIAS::Vector3< T >::operator*(), BIAS::Vector4< T >::operator*(), TNT::Matrix< T >::operator+(), TNT::Matrix< T >::operator-(), BIAS::Matrix3x4< T >::operator=(), BIAS::Matrix4x4< T >::operator=(), BIAS::PMatrix::PMatrix(), BIAS::PMatrixBase::PMatrixBase(), BIAS::CovTransformPose::PoseEulerZYXToQuat(), BIAS::CovTransformPose::PoseQuatToEulerZYX(), BIAS::IteratedExtendedKalman::Predict(), BIAS::RMatrix::RMatrix(), BIAS::RMatrixBase::RMatrixBase(), BIAS::Matrix< T >::Set(), BIAS::RParametrization::SetCovarianceMatrix(), BIAS::PoseParametrization::SetCovarianceMatrix(), BIAS::EParametrization::SetCovarianceMatrix(), BIAS::LocalAffineFrame::SetFromMatrix(), BIAS::IteratedExtendedKalman::SetProcessCov(), BIAS::ContourBSplineShapeMatrix::SetShapeSpaceMatrix(), BIAS::IteratedExtendedKalman::SetState(), BIAS::ContourBSplineShapeMatrix::SetSubShapeSpaceZero(), BIAS::GaussHelmert::Solve(), BIAS::LeastSquaresSVD::Solve(), BIAS::SVD::Solve(), BIAS::CamPoseCalib::SolveLM_(), SquaredMahalanobisDistance(), BIAS::ImageAlignment::StrictPyramidAlign(), BIAS::Matrix< T >::Sub(), BIAS::Matrix< T >::SubIP(), BIAS::SymmetricMatrix3x3< T >::SymmetricMatrix3x3(), BIAS::TrackerBaseAffine2< StorageType >::TrackAffine_(), BIAS::MonteCarloTransform::Transform(), BIAS::UnscentedTransform::Transform(), BIAS::CovTransformPose::TransformPoint3D(), BIAS::CovTransformPose::TransformPose(), TNT::transpose(), BIAS::Kalman::Update(), BIAS::IteratedExtendedKalman::Update(), Upper_symmetric_eigenvalue_solve(), and BIAS::LeastSquaresLapack::WeightedSolve().
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inherited |
method to save directly to a given filename.
internally using stream operator
|
inherited |
Scales column NoCol with scale.
|
inherited |
Scales row NoRow with scale.
|
inlineprotectedinherited |
Definition at line 152 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=().
|
inherited |
|
inherited |
Copies the contents of data into this at the position indicated by row and col.
The size of *this must be big enought to carry data
|
inherited |
Copies the contents of data into this at the position indicated by row and col.
The size of *this must be big enought to carry data. Data i interpreted as column vector
|
inherited |
set a col of matrix from vector
| void HomgPoint3DCov::SetEuclidean | ( | const Matrix3x3< double > & | m | ) |
Definition at line 133 of file HomgPoint3DCov.cpp.
References CheckSymmetry_(), MakeSymmetric_(), and BIAS::Matrix< double >::SetZero().
Referenced by HomgPoint3DCov().
|
inlineinherited |
set the elements of this matrix to the identity matrix
(posisbly overriding the inherited method)
Definition at line 260 of file Matrix4x4.hh.
|
inherited |
set a row of matrix from vector
|
inherited |
sets a submatrix in this.
Start index in this is [startRowInThis][startColInThis] end index is [startRowInThis+numRows-1][startColInThis+numCols-1]. Entries copyed from submatrix beginning at [startRowInSub][startColInSub] and stop at [startRowInSub+numRows-1][startColInSub+numCols-1]
|
inherited |
sets a 3x3 submatrix in this.
Start index in this is [startRowInThis][startColInThis] end index is [startRowInThis+2][startColInThis+2].
|
inherited |
sets a 3x1 submatrix in this.
Start index in this is [startRowInThis][startColInThis] end index is [startRowInThis+2][startColInThis].
|
inherited |
Copies the contents of data into this at the position indicated by row and col.
The size of *this must be big enought to carry data. Data is interpreted as row vector.
|
inlineinherited |
|
inlineinherited |
Definition at line 212 of file cmat.h.
Referenced by Eigenproblem_quadratic_matrix(), BIAS::Random::GetMeanAndCovariance(), BIAS::Matrix< T >::operator==(), and BIAS::IteratedExtendedKalman::SetState().
|
inlineinherited |
substraction function, storing data destination matrix
|
inlineinherited |
Subtracts arg from this
this -= arg.
|
inlineinherited |
|
inherited |
swaps two rows
|
inlineinherited |
|
inlineinherited |
Definition at line 315 of file Matrix4x4.hh.
|
inlineinherited |
tranpose this matrix "in place"
example: 0 1 2 3 –> 0 4 8 12 4 5 6 7 –> 1 5 9 13 8 9 10 11 –> 2 6 10 14 12 13 14 15 –> 3 7 11 15
Definition at line 302 of file Matrix4x4.hh.
|
inherited |
vec-operator returns the elements of the matrix columwise as vector
vec-operator returns the elements of the matrix columnwise as vector
|
inherited |
Write the matrix in Matlab format to the given stream.
| name | Is the name of the Matlab variable |
Definition at line 842 of file cmat.h.
References TNT::matmult().
Definition at line 915 of file cmat.h.
References TNT::matmult().
Definition at line 730 of file cmat.h.
References TNT::Matrix< T >::num_cols(), and TNT::Matrix< T >::num_rows().
Definition at line 752 of file cmat.h.
References TNT::Matrix< T >::num_cols(), and TNT::Matrix< T >::num_rows().
|
related |
|
related |
|
related |
|
related |
Definition at line 703 of file cmat.h.
References TNT::Matrix< T >::Read().
|
related |
Definition at line 711 of file cmat.h.
References TNT::Matrix< T >::Read().
|
related |
Definition at line 719 of file cmat.h.
References TNT::Matrix< T >::Read().
|
protectedinherited |
Definition at line 84 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::copy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::dim(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), TNT::Matrix< BIAS::BIAS::Vector< int > >::num_rows(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator()(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator[](), and TNT::Matrix< BIAS::BIAS::Vector< int > >::set().
|
protectedinherited |
Definition at line 86 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator()(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::size().
|
protectedinherited |
Definition at line 85 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::copy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::dim(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), TNT::Matrix< BIAS::BIAS::Vector< int > >::num_cols(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator()(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::set().
|
protectedinherited |
Definition at line 88 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), BIAS::PMatrix::Normalize(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::operator[]().
|
protectedinherited |
Definition at line 90 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::operator()().
|
protectedinherited |
Definition at line 87 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::copy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::destroy(), TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), TNT::Matrix< BIAS::BIAS::Vector< int > >::Matrix(), BIAS::AffineTransf::Mult(), BIAS::AffineTransf::operator=(), TNT::Matrix< BIAS::BIAS::Vector< int > >::operator=(), TNT::Matrix< BIAS::BIAS::Vector< int > >::set(), and BIAS::AffineTransf::SetAsRotationMatrix().
|
protectedinherited |
Definition at line 89 of file cmat.h.
Referenced by TNT::Matrix< BIAS::BIAS::Vector< int > >::initialize(), and TNT::Matrix< BIAS::BIAS::Vector< int > >::operator()().
 1.8.5
1.8.5