|
Basic Image AlgorithmS Library
2.8.0
|
|
Basic Image AlgorithmS Library
2.8.0
|
Base class for rectification implementations that make use of projections to represent rectified state and where the projection-centers in rectified and original state are the same. More...
#include <Image/RectificationViaProjectionMappingBase.hh>
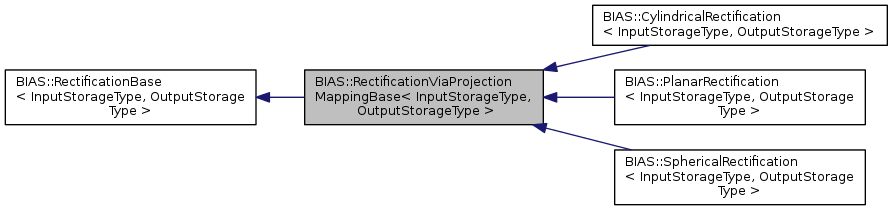
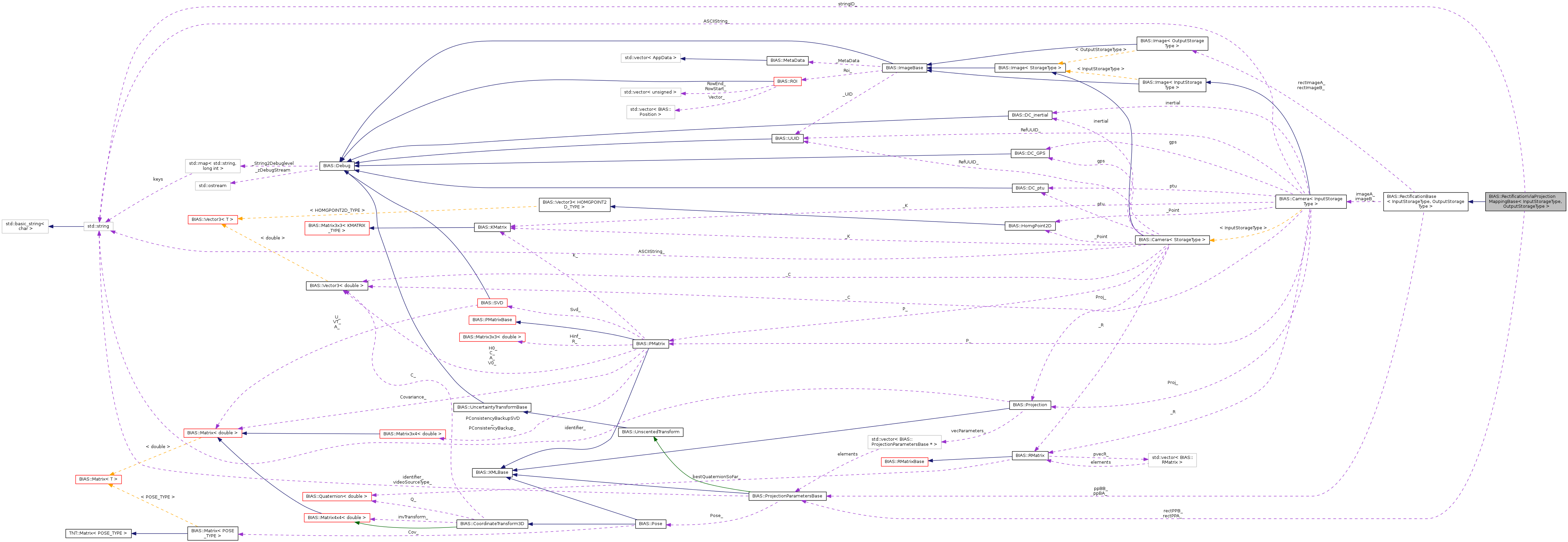
 Inheritance diagram for BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >: Collaboration diagram for BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >:
Inheritance diagram for BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >: Collaboration diagram for BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >:Public Member Functions | |
| virtual int | Disp2Depth (const Image< float > &DisparityMap, Image< float > &DepthMap, unsigned int border) |
| Uses the passed disparity map for camera A to calculate the corresponding depth map. More... | |
| virtual int | GetClonesOfRectificationParameters (ProjectionParametersBase *&rectPPA, ProjectionParametersBase *&rectPPB) |
| Tries to calculate the rectification parameters and returns clones of internal members. More... | |
| virtual bool | IsInputCameraValid (const BIAS::Image< InputStorageType > &img, const BIAS::ProjectionParametersBase *proj)=0 |
| RectificationViaProjectionMappingBase (const std::string &stringID, const double &Scale=1.0) | |
| virtual int | Rectify () |
| Fundamental method which contains the rectification implementation. More... | |
| virtual int | SetCameraA (BIAS::Camera< InputStorageType > &cam) |
| virtual int | SetCameraA (const BIAS::Image< InputStorageType > &img, const BIAS::ProjectionParametersBase *proj) |
| virtual int | SetCameraB (BIAS::Camera< InputStorageType > &cam) |
| virtual int | SetCameraB (const BIAS::Image< InputStorageType > &img, const BIAS::ProjectionParametersBase *proj) |
| void | SetInterpolationMethod (InterpolationMethod interpolationType) |
| Determines the type of interpolation used when rectifying. More... | |
| void | SetOverrideAngles (double thetaMinOverride, double thetaMaxOverride, double phiMinOverride, double phiMaxOverride) |
| Set the override angles, which are individually chosen for the internal parameters, if the respective override leads to a smaller fov of the rectified cameras, then the automatically derived fov. More... | |
| void | SetScale (const double &scale) |
| Scale factor for isotropically scaling the rectified images (and rectified intrinsic parameters). More... | |
| void | SetSecondFill (OutputStorageType d) |
| fill color for second image (first is black) More... | |
| void | SetTargetWidth (unsigned int targetWidth) |
| Similar to SetScale but uses the argument width to determine scale factor. More... | |
| void | UseLookUpTables (bool use) |
| Method allows to turn on or off the use of look up tables. More... | |
| virtual | ~RectificationViaProjectionMappingBase () |
Getters | |
Return stored results. If there are. | |
| void | GetRectifiedImageA (Image< OutputStorageType > &rectImg) |
| void | GetRectifiedImageB (Image< OutputStorageType > &rectImg) |
| bool | IsInputCameraValid (BIAS::Camera< InputStorageType > &cam) |
| Method calls two parameteric pure virtual method. More... | |
Grabbing/RT Utils | |
Methods granting direct access to data structures of rectification.
| |
| Camera< InputStorageType > * | GetImagePointerA () |
| Camera< InputStorageType > * | GetImagePointerB () |
| const Image< OutputStorageType > * | GetRectifiedImagePointerA () |
| const Image< OutputStorageType > * | GetRectifiedImagePointerB () |
Static Public Member Functions | |
| static int | Disp2Depth (const Image< float > &DisparityMap, Image< float > &DepthMap, const ProjectionParametersBase *origCamPA, const ProjectionParametersBase *origCamPB, const ProjectionParametersBase *rectCamPA, const ProjectionParametersBase *rectCamPB, unsigned int border) |
Utility functions | |
Methods connected with rectification but are rather unspecific. | |
| static int | CalculateRectifiedBases (const Pose &poseA, const Pose &poseB, Pose &poseResA, Pose &poseResB, bool failIfForwardMove=false) |
| Method determines two orthonormal bases suitable for rectification. More... | |
| static int | CalculateMeanOrientation (const Pose &poseLeft, const Pose &poseCenter, const Pose &poseRight, Quaternion< double > &orientation) |
| Method calculates an intermediate orientation for rectification from all three poses. More... | |
Protected Member Functions | |
| bool | AreRectificationParametersValid_ () |
| Checks for rectificationParamsAreValid_ if not true will try to succsessfully process DetermineRectificationParameters_(). More... | |
| virtual int | DetermineRectificationParameters_ ()=0 |
| Calculating the projection parameters for specific rectification. More... | |
| int | DetermineScaledRectificationParameters_ () |
| this computes ideal parameters and applies the scale More... | |
Initialization. | |
The general rectification procedure runs as follows:
The rectification setup can be stored and loaded. The full initialization procedure is not necessary if the BWM-LUTs are loaded. In this case it suffices to initialize the target images (InitializeSinkImages_()). If informations about the mapping process have to be aquired without rectifciation, it can be of use to initialize the objects performing the mapping. This can be done using InitializeProjectionMappingObjects_().
| |
| void | InitializeMapping_ () |
| Initializes lut structure and the result images. More... | |
| void | InitializeSinkImages_ () |
| void | InitializeProjectionMappingObjects_ () |
Protected Attributes | |
| Camera< InputStorageType > | imageA_ |
| local copy of passed image More... | |
| Camera< InputStorageType > | imageB_ |
| local copy of passed image More... | |
| InterpolationMethod | interpolationType_ |
| bool | mappingInitialized_ |
| Tells whether the lut structure and the result images have been initialized. More... | |
| double | phiMaxOverride_ |
| Value used to override phiMax result of automatic fov calculation if phiMaxOverride_ is smaller. More... | |
| double | phiMinOverride_ |
| Value used to override phiMin result of automatic fov calculation if phiMinOverride_ is larger. More... | |
| ProjectionParametersBase * | ppBA_ |
| local copy of passed projection parameters More... | |
| ProjectionParametersBase * | ppBB_ |
| local copy of passed projection parameters More... | |
| bool | rectificationParamsAreValid_ |
| Flag is true when DetermineRectificationParameters_() was succesfull and no setter was called afterwards. More... | |
| Image< OutputStorageType > | rectImageA_ |
| Results of rectification. More... | |
| Image< OutputStorageType > | rectImageB_ |
| Results of rectification. More... | |
| ProjectionMapping < InputStorageType, OutputStorageType > | rectMapperA_ |
| Classes holding rectification parameters and performing mapping. More... | |
| ProjectionMapping < InputStorageType, OutputStorageType > | rectMapperB_ |
| ProjectionParametersBase * | rectPPA_ |
| Projection parameters of the rectified image A. More... | |
| ProjectionParametersBase * | rectPPB_ |
| Projection parameters of the rectified image B. More... | |
| double | scale_ |
| scale computed rectification resolution by this amount More... | |
| OutputStorageType | secondFill_ |
| unsigned int | targetWidth_ |
| if this value is greater zero the scale the computed rectification parameters are isotropically scaled by a scale factor so that the image width of both rectified images matches this value. More... | |
| double | thetaMaxOverride_ |
| Value used to override thetaMax result of automatic fov calculation if thetaMaxOverride_ is smaller. More... | |
| double | thetaMinOverride_ |
| Value used to override thetaMin result of automatic fov calculation if thetaMinOverride_ is larger. More... | |
| bool | useLookUpTables_ |
| Toggles the use of lookup tables. More... | |
Rectification Setup I/O | |
| std::string | stringID_ |
| Descriptive identifier of the classes in the hierarchy. More... | |
| int | GetRectificationSetup (Camera< float > &rectSetup) |
| Method returns the current rectification setup. More... | |
| int | SetRectificationSetup (Camera< float > &rectSetup) |
| Loads rectification setup from Camera data. More... | |
| int | GetRectifyingDisplacementMaps (Image< float > &displacementA, Image< float > &displacementB) |
| Returns the displacement maps rather then the rectified images, Suitable for texture look ups for multiple images of same configuration. More... | |
| const std::string & | GetStringID () const |
| Returns the string id that identifies the rctification classes in this hierarchy. More... | |
Base class for rectification implementations that make use of projections to represent rectified state and where the projection-centers in rectified and original state are the same.
Implementation of child classes only have to supply the rectified params calculation. Aftwerwards they can make use of the ProjectionMapping facilities that are implemented in this class to rectify images and evaluate disparity maps into depth maps. Be warned: ProjectionMapping is a very expansive implementation, yet takles nonlinearities in coordinate transformation (i.e. distortions).
Definition at line 51 of file RectificationViaProjectionMappingBase.hh.
|
virtual |
Definition at line 54 of file RectificationViaProjectionMappingBase.cpp.
| BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::RectificationViaProjectionMappingBase | ( | const std::string & | stringID, |
| const double & | Scale = 1.0 |
||
| ) |
Definition at line 62 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::secondFill_.
|
protected |
Checks for rectificationParamsAreValid_ if not true will try to succsessfully process DetermineRectificationParameters_().
If this is the case it will set rectificationParamsAreValid_ to true and return this value. Otherwise will return false.
Definition at line 136 of file RectificationViaProjectionMappingBase.cpp.
|
staticinherited |
Method calculates an intermediate orientation for rectification from all three poses.
Does not check for forward movement now! Fails if two of the cameras are the same!
Definition at line 254 of file RectificationBase.cpp.
References BIAS::Vector3< T >::CrossProduct(), BIAS::Equal(), BIAS::CoordinateTransform3D::GetC(), BIAS::Matrix3x3< T >::GetDeterminant(), BIAS::RMatrixBase::GetQuaternion(), BIAS::Pose::GetZAxis(), BIAS::Vector3< T >::Normalize(), and BIAS::Vector3< T >::ScalarProduct().
|
staticinherited |
Method determines two orthonormal bases suitable for rectification.
This bases are parallel to oneanother. The x-basevector is parallel to the line connecting the origins of poseA and poseB. The z-basevector is chosen so that it is in between the z-vectors of original poses.
| failIfForwardMove | if true will have an error code(<0) returned if one of the original z-basevectors is parallel to baseline |
Definition at line 317 of file RectificationBase.cpp.
References BIAS::Vector3< T >::CrossProduct(), BIAS::Equal(), BIAS::CoordinateTransform3D::GetC(), BIAS::RMatrixBase::GetQuaternion(), BIAS::CoordinateTransform3D::GetR(), BIAS::Vector3< T >::Normalize(), BIAS::Vector3< T >::NormL2(), BIAS::Vector3< T >::ScalarProduct(), BIAS::Pose::Set(), and BIAS::Vector3< T >::Set().
|
protectedpure virtual |
Calculating the projection parameters for specific rectification.
Is called by Rectify implementation. Must return 0 upon success, every other code is handled as failure.
Implemented in BIAS::PlanarRectification< InputStorageType, OutputStorageType >, BIAS::CylindricalRectification< InputStorageType, OutputStorageType >, and BIAS::SphericalRectification< InputStorageType, OutputStorageType >.
|
protected |
this computes ideal parameters and applies the scale
Definition at line 152 of file RectificationViaProjectionMappingBase.cpp.
|
virtual |
Uses the passed disparity map for camera A to calculate the corresponding depth map.
| DisparityMap | disparity map for camera A. |
| DepthMap | resulting depth map for camera A. |
| border | image border of depth map that will be ignored |
Implements BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 679 of file RectificationViaProjectionMappingBase.cpp.
|
static |
Definition at line 459 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::Image< StorageType >::BilinearInterpolationGreyMinVal(), BIAS::Equal(), BIAS::Gauss< InputStorageType, OutputStorageType >::Filter(), BIAS::GradientSimple< InputStorageType, OutputStorageType >::Filter(), BIAS::ProjectionParametersBase::GetC(), BIAS::HomgPoint3D::GetEuclidean(), BIAS::Image< StorageType >::GetImageDataArray(), BIAS::ProjectionParametersBase::GetImageSize(), BIAS::Image< StorageType >::GetMinPixelValue(), BIAS::BackwardMapping< InputStorageType, OutputStorageType >::GetSourceCoordinates(), BIAS::TrackerBaseInterface< StorageType >::Init(), BIAS::Image< StorageType >::Init(), BIAS::MatrixZero, BIAS::Vector3< T >::NormL2(), BIAS::RT_MAD, BIAS::ImageIO::Save(), BIAS::HomgPoint2D::Set(), BIAS::TrackerBaseInterface< StorageType >::SetAffineBrightnessInvariance(), BIAS::TrackerBaseInterface< StorageType >::SetHalfWinSize(), BIAS::TrackerBaseInterface< StorageType >::SetMaxError(), BIAS::TrackerBaseInterface< StorageType >::SetMaxIterations(), BIAS::TrackerBaseInterface< StorageType >::SetMaxResiduumMAD(), BIAS::TrackerBaseInterface< StorageType >::SetRejectionType(), BIAS::Gauss< InputStorageType, OutputStorageType >::SetSigma(), BIAS::ProjectionMapping< InputStorageType, OutputStorageType >::SetSinkCam(), BIAS::ProjectionMapping< InputStorageType, OutputStorageType >::SetSourceCam(), BIAS::ImageBase::SetZero(), BIAS::TrackerBaseInterface< StorageType >::Track(), and BIAS::Triangulation::Triangulate().
|
virtual |
Tries to calculate the rectification parameters and returns clones of internal members.
If just one rectification parameter could not be determined the returned pointer will be NULL and the return value is less 0.
Definition at line 238 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::ProjectionParametersBase::Clone().
|
inherited |
Definition at line 221 of file RectificationBase.cpp.
|
inherited |
Definition at line 229 of file RectificationBase.cpp.
| int BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::GetRectificationSetup | ( | Camera< float > & | rectSetup | ) |
Method returns the current rectification setup.
The Camera class is used as a carrier for the camera parameters stored in the meta data under a single projection. The image data part is containing the BWM-Look-Up-Tables. Each image row contains a single BWM-LUT. The ascii meta data field will contain the StringID of the rectification, which can be quaried using GetStringID().
Definition at line 296 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::Projection::AddRelativeCamera(), BIAS::Image< StorageType >::GetImageDataArray(), BIAS::Image< StorageType >::Init(), BIAS::Camera< StorageType >::SetASCIIString(), BIAS::Camera< StorageType >::SetProj(), and BIAS::Camera< StorageType >::UpdateMetaData().
|
inherited |
Definition at line 205 of file RectificationBase.cpp.
|
inherited |
Definition at line 212 of file RectificationBase.cpp.
|
inherited |
Definition at line 237 of file RectificationBase.cpp.
|
inherited |
Definition at line 246 of file RectificationBase.cpp.
| int BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::GetRectifyingDisplacementMaps | ( | Image< float > & | displacementA, |
| Image< float > & | displacementB | ||
| ) |
Returns the displacement maps rather then the rectified images, Suitable for texture look ups for multiple images of same configuration.
Definition at line 262 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::Image< StorageType >::Init(), BIAS::ImageBase::IsEmpty(), and BIAS::Image< StorageType >::Release().
|
inline |
Returns the string id that identifies the rctification classes in this hierarchy.
Suitable for factories from information stored in Setup files.
Definition at line 155 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Initializes lut structure and the result images.
Definition at line 216 of file RectificationViaProjectionMappingBase.cpp.
|
protected |
Definition at line 204 of file RectificationViaProjectionMappingBase.cpp.
|
protected |
Definition at line 183 of file RectificationViaProjectionMappingBase.cpp.
|
inherited |
Method calls two parameteric pure virtual method.
Method is called by SetCamera* methods and returns true if arguments are accepted by rectification implementations. E.g. a rectification method specialised on perspective images will refuse to handle spherical parameters. If method returns false the SetCamera* routines will also fail.
Definition at line 46 of file RectificationBase.cpp.
References BIAS::Projection::GetParameters(), BIAS::Camera< StorageType >::GetProj(), and BIAS::Camera< StorageType >::ParseMetaData().
|
pure virtualinherited |
|
virtual |
Fundamental method which contains the rectification implementation.
Implements BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 400 of file RectificationViaProjectionMappingBase.cpp.
|
virtual |
Reimplemented from BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 76 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::Projection::GetParameters(), BIAS::Camera< StorageType >::GetProj(), and BIAS::Camera< StorageType >::ParseMetaData().
|
virtual |
Reimplemented from BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 87 of file RectificationViaProjectionMappingBase.cpp.
|
virtual |
Reimplemented from BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 101 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::Projection::GetParameters(), BIAS::Camera< StorageType >::GetProj(), and BIAS::Camera< StorageType >::ParseMetaData().
|
virtual |
Reimplemented from BIAS::RectificationBase< InputStorageType, OutputStorageType >.
Definition at line 112 of file RectificationViaProjectionMappingBase.cpp.
| void BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::SetInterpolationMethod | ( | InterpolationMethod | interpolationType | ) |
Determines the type of interpolation used when rectifying.
Types are taken from BackwardMapping.hh
Definition at line 126 of file RectificationViaProjectionMappingBase.cpp.
| void BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::SetOverrideAngles | ( | double | thetaMinOverride, |
| double | thetaMaxOverride, | ||
| double | phiMinOverride, | ||
| double | phiMaxOverride | ||
| ) |
Set the override angles, which are individually chosen for the internal parameters, if the respective override leads to a smaller fov of the rectified cameras, then the automatically derived fov.
The angles are defined in the rectified coordinate frame of the first camera and have the same defintion as the angle coordinates used in ProjectionParametersGreatCircle.
Definition at line 382 of file RectificationViaProjectionMappingBase.cpp.
| int BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::SetRectificationSetup | ( | Camera< float > & | rectSetup | ) |
Loads rectification setup from Camera data.
Definition at line 347 of file RectificationViaProjectionMappingBase.cpp.
References BIAS::ProjectionParametersBase::Clone(), BIAS::Camera< StorageType >::GetASCIIString(), BIAS::Image< StorageType >::GetImageDataArray(), BIAS::Projection::GetParameters(), BIAS::Camera< StorageType >::GetProj(), BIAS::ImageBase::GetWidth(), and BIAS::Camera< StorageType >::ParseMetaData().
|
inline |
Scale factor for isotropically scaling the rectified images (and rectified intrinsic parameters).
Definition at line 66 of file RectificationViaProjectionMappingBase.hh.
|
inline |
fill color for second image (first is black)
Definition at line 115 of file RectificationViaProjectionMappingBase.hh.
| void BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::SetTargetWidth | ( | unsigned int | targetWidth | ) |
Similar to SetScale but uses the argument width to determine scale factor.
Method sets the value of targetWidth_ which defaults to zero. If targetWidth_ is set greater then zero an isotropic scale factor for the calculated rectified intrinsic parameters is derived so that both rectified images will have this width.
Definition at line 908 of file RectificationViaProjectionMappingBase.cpp.
| void BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::UseLookUpTables | ( | bool | use | ) |
Method allows to turn on or off the use of look up tables.
Per default use of look up tables is turned on. If it is turned off loading rectification setups will turn it on!
Definition at line 916 of file RectificationViaProjectionMappingBase.cpp.
|
protectedinherited |
local copy of passed image
Definition at line 178 of file RectificationBase.hh.
|
protectedinherited |
local copy of passed image
Definition at line 184 of file RectificationBase.hh.
|
protected |
Definition at line 239 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Tells whether the lut structure and the result images have been initialized.
This flag is set to true by method InitializeMapping_(). It is false after object creation and is set false when rectificationParamsAreValid_ flag changes from false to true, which is the case in AreRectificationParametersValid_().
Definition at line 251 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Value used to override phiMax result of automatic fov calculation if phiMaxOverride_ is smaller.
Definition at line 300 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Value used to override phiMin result of automatic fov calculation if phiMinOverride_ is larger.
Definition at line 295 of file RectificationViaProjectionMappingBase.hh.
|
protectedinherited |
local copy of passed projection parameters
Definition at line 175 of file RectificationBase.hh.
|
protectedinherited |
local copy of passed projection parameters
Definition at line 181 of file RectificationBase.hh.
|
protected |
Flag is true when DetermineRectificationParameters_() was succesfull and no setter was called afterwards.
Definition at line 237 of file RectificationViaProjectionMappingBase.hh.
|
protectedinherited |
Results of rectification.
Definition at line 187 of file RectificationBase.hh.
|
protectedinherited |
Results of rectification.
Definition at line 190 of file RectificationBase.hh.
|
protected |
Classes holding rectification parameters and performing mapping.
Definition at line 243 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Definition at line 244 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Projection parameters of the rectified image A.
Definition at line 212 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Projection parameters of the rectified image B.
Definition at line 215 of file RectificationViaProjectionMappingBase.hh.
|
protected |
scale computed rectification resolution by this amount
Definition at line 218 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Definition at line 240 of file RectificationViaProjectionMappingBase.hh.
Referenced by BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::RectificationViaProjectionMappingBase().
|
protected |
Descriptive identifier of the classes in the hierarchy.
Definition at line 197 of file RectificationViaProjectionMappingBase.hh.
|
protected |
if this value is greater zero the scale the computed rectification parameters are isotropically scaled by a scale factor so that the image width of both rectified images matches this value.
Its value is set using SetTargetWidth().
Definition at line 224 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Value used to override thetaMax result of automatic fov calculation if thetaMaxOverride_ is smaller.
Definition at line 290 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Value used to override thetaMin result of automatic fov calculation if thetaMinOverride_ is larger.
Definition at line 285 of file RectificationViaProjectionMappingBase.hh.
|
protected |
Toggles the use of lookup tables.
Definition at line 304 of file RectificationViaProjectionMappingBase.hh.
 1.8.5
1.8.5