|
Basic Image AlgorithmS Library
2.8.0
|
|
Basic Image AlgorithmS Library
2.8.0
|
camera parameters which define the mapping between rays in the camera coordinate system and pixels in the image as well as external pose More...
#include <Geometry/ProjectionParametersPerspective.hh>
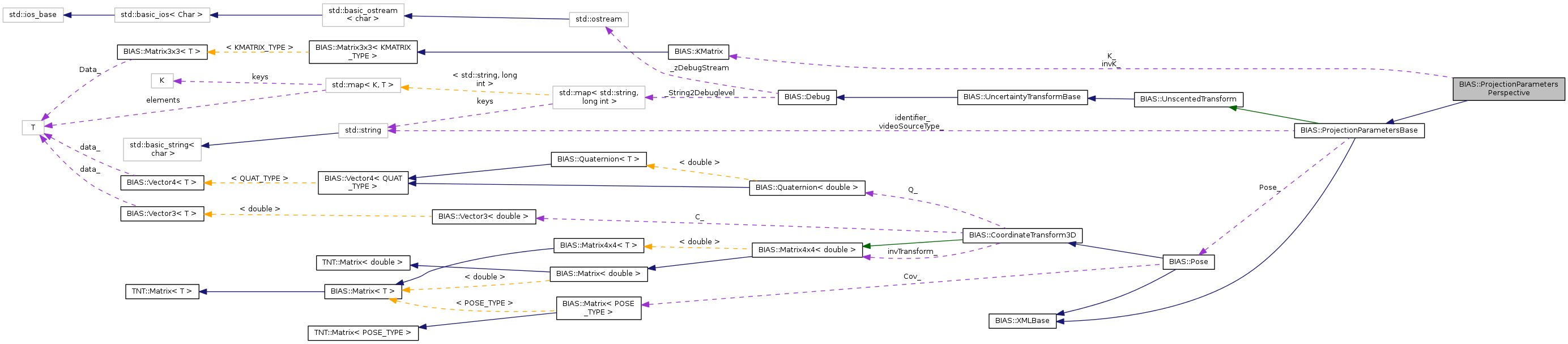
 Inheritance diagram for BIAS::ProjectionParametersPerspective: Collaboration diagram for BIAS::ProjectionParametersPerspective:
Inheritance diagram for BIAS::ProjectionParametersPerspective: Collaboration diagram for BIAS::ProjectionParametersPerspective:Public Member Functions | |
| virtual ProjectionParametersPerspective * | Clone () const |
| covariant virtual copy constructor for use in Projection More... | |
| virtual bool | CValid () const |
| Check of current projection center is valid. More... | |
| virtual bool | Distort (BIAS::HomgPoint2D &point2d) const |
| Using the Matlab camera calibration toolbox parameters for a distortion of undistorted coordinates. More... | |
| int | DistortNormalized (BIAS::HomgPoint2D &point2d) const |
| Undistort distorted coordinates using the standard distortion parameters and the parameter describing the second constant root of the distortion polynomial of the radial symmetric distortion. More... | |
| virtual bool | DoesPointProjectIntoImage (const HomgPoint3D &X, HomgPoint2D &x, bool IgnoreDistortion=false) const |
| Checks if 3D point projects into specified image and returns belonging 2D image point. More... | |
| bool | DoesPointProjectIntoImageLocal (const Vector3< double > &localX, HomgPoint2D &x, bool IgnoreDistortion=false) const |
| Checks if 3D point projects into specified image and returns belonging 2D image point. More... | |
| virtual const bool | DoExtrinsicsDiffer (const ProjectionParametersBase *p) const |
| virtual const bool | DoIntrinsicsDiffer (const ProjectionParametersBase *p) const |
| virtual double | GetAspectratio () const |
| Return aspectratio (i.e. More... | |
| virtual BIAS::Vector3< double > | GetC () const |
| Get projection center. More... | |
| virtual BIAS::Matrix< POSE_TYPE > | GetCov () const |
| Return pose covariance as 7x7 matrix with respect to C, Q. More... | |
| virtual BIAS::Vector< double > | GetCQ () const |
| Return pose as 7 vector (first projection center C, then unit quaternion Q representing orientation). More... | |
| bool | GetCutOutParameters (const Vector2< int > ¢erPoint, const unsigned int halfWidth, const unsigned int halfHeight, ProjectionParametersPerspective &cutOutParams) const |
| Shifts the principle point so that imagePoint-(halfWidth, halfHeight) is mapped to (0,0). More... | |
| BIAS_ProjParaPersp_DISTORTION_TYPE | GetDistortionType () const |
| Get type of distortion parameters. More... | |
| virtual BIAS::Matrix3x4< double > | GetExternals () const |
| Return cached 3x4 representation of external matrix [R|C]. More... | |
| virtual BIAS::KMatrix | GetFakeKMatrix (double &imgsize, int resolution=0, const double &maxangle=1.4) const |
| Returns a fake KMatrix for the camera. More... | |
| virtual BIAS::KMatrix | GetFakeKMatrix (int resolution=0, const double &maxangle=1.4) const |
| virtual void | GetFirstBorderPixel (PixelIterator &it) |
| call this to start a run at the outer boundary of an image. More... | |
| virtual void | GetFirstEdgePosition (PixelIterator &it) |
| call this to start a run at the outer boundary of an image. More... | |
| void | GetFocalLength (double &f) const |
| Get the current camera focal length. More... | |
| double | GetFocalLength () const |
| Returns the focal length. More... | |
| Matrix4x4< double > | GetGLModelviewProjectionMatrix (const double zNear, const double zFar, const bool flip, const bool transpose=false) |
| Calculates an ModelViewProjection matrix useable in OpenGL. More... | |
| Matrix4x4< double > | GetGLProjectionMatrix (const double zNear, const double zFar, const bool flip, const bool transpose=false) |
| Calculates an projection matrix useable in OpenGL. More... | |
| Matrix4x4< double > | GetGLProjectionMatrix (const double zNear, const double zFar, const Vector2< unsigned int > upperLeft, const unsigned int width, const unsigned int height, const bool flip, const bool transpose=false) |
| Calculates an projection matrix useable in OpenGL. More... | |
| void | GetIdealImageSize (unsigned int &width, unsigned int &height) const |
| void | GetIdealK (KMatrix &K) const |
| virtual std::string | GetIdentifier () const |
| virtual const unsigned int & | GetImageHeight () const |
| Returns the image height. More... | |
| virtual int | GetImageSize (unsigned int &Width, unsigned int &Height) const |
| Obtain image dimensions. More... | |
| virtual const unsigned int & | GetImageWidth () const |
| Returns the image width. More... | |
| virtual BIAS::KMatrix | GetK () const |
| virtual BIAS::KMatrix | GetKinv () const |
| virtual int | GetMinimalAngularSamplingStep (double &minAngleStep) |
| Delivers the assumed minimal angular distance between two optical rays belonging to integer image coordinates within the FoV. More... | |
| double | GetMinZLocal () const |
| minimum z value of ray in image (if computed already) More... | |
| virtual bool | GetNextBorderPixel (PixelIterator &it) |
| call this iteratively to run at the outer boundary of an image. More... | |
| virtual bool | GetNextEdgePosition (PixelIterator &it) |
| call this iteratively to run at the outer edge of an image. More... | |
| virtual BIAS::PMatrix | GetP () const |
| virtual const BIAS::Pose & | GetPose () const |
| Return complete pose object. More... | |
| virtual BIAS::PoseParametrization | GetPoseParametrization () const |
| Return copy of pose parametrization object. More... | |
| virtual int | GetPrincipal (double &PrincipalX, double &PrincipalY) const |
| Get principal point (in pixels relative to top left corner). More... | |
| virtual BIAS::Quaternion< double > | GetQ () const |
| Get orientation as unit quaternion. More... | |
| virtual BIAS::RMatrix | GetR () const |
| Get orientation as rotation matrix R. More... | |
| double | GetSkew () const |
| Obtain the current camera skew factor. More... | |
| virtual int | GetSphericalViewingRange (const CoordinateTransform3D &sphericalReferenceFrame, double &minPhi, double &maxPhi, double ¢erPhi, double &minTheta, double &maxTheta) |
| Determines the maximal and minimal viewing range in means of spherical coordinates. More... | |
| void | GetUndistortion (double &kc1, double &kc2, double &kc3, double &kc4) const |
| void | GetUndistortion (double &kc1, double &kc2, double &kc3, double &kc4, double r0) const |
| void | GetUndistortionBrown (double &kc1, double &kc2, double &kc3, double &kc4, double &r0) const |
| Get the lens undistortion parameters including the parameter describing root of the polynomial. More... | |
| void | GetUndistortionInverseRad (double &kc1, double &kc2, double &kc3, double &kc4) const |
| void | GetUndistortionInvRad3 (double &kc1, double &kc2, double &kc3) |
| void | GetUndistortionRad3 (double &kc1, double &kc2, double &kc3) |
| virtual int | GetUnProjectionJacobian (const HomgPoint2D &x, Matrix2x2< double > &Jac, const bool homogenized=true) const |
| Get warp (local magnification/shear/...) when going from the real image to ideal image with focal length = 1. More... | |
| virtual std::string | GetVideoSourceType () const |
| virtual void | InvalidatePose () |
| Invalidate currently set pose. More... | |
| bool | IsDistorted () const |
| bool | IsLeftOf (const ProjectionParametersBase &ppb) const |
| Returns true if the camera represented by this ProjectionParametersBase is left of the given one. More... | |
| const bool | LookAt (const Vector3< double > &eye, const Vector3< double > ¢er, const Vector3< double > &up) |
| Looks at given point, similar to gluLookAt. More... | |
| const bool | LookAt (const Vector3< double > ¢er, const Vector3< double > &up) |
| Looks at given point, similar to gluLookAt. More... | |
| const bool | LookAtGL (const Vector3< double > &eye, const Vector3< double > ¢er, const Vector3< double > &up) |
| Looks at given point, similar to gluLookAt. More... | |
| const bool | LookAtGL (const Vector3< double > ¢er, const Vector3< double > &up) |
| Looks at given point, similar to gluLookAt. More... | |
| ProjectionParametersPerspective & | operator= (const ProjectionParametersPerspective &P) |
| virtual bool | PoseValid () const |
| Check if current pose is valid. More... | |
| virtual HomgPoint2D | Project (const HomgPoint3D &X, bool IgnoreDistortion=false) const |
| calculates the projection of a point in the world coordinate system to a pixel in the image plane of the camera !warning! the function my return an invalid point (0,0,0) in certain cases (3d point) behind camera or 3d point to close to camera center More... | |
| virtual int | Project (const HomgPoint3D &X, HomgPoint2D &p2d, bool IgnoreDistortion=false) const |
| calculates the projection of a point in the world coordinate system to a pixel in the image plane of the camera. More... | |
| ProjectionParametersPerspective (const unsigned int width=0, const unsigned int height=0) | |
| ProjectionParametersPerspective (const BIAS::PMatrix &P, const unsigned int width=10000, const unsigned int height=10000) | |
| ProjectionParametersPerspective (const ProjectionParametersPerspective &P) | |
| virtual HomgPoint2D | ProjectLocal (const Vector3< double > &point, bool IgnoreDistortion=false) const |
| calculates the projection of a point in the camera coordinate system to a pixel in the image plane of the camera with lens distortion In the simplest case perspective pinhole projection x = K * y where y is the projection of X using y = (R^T | -R^T C) X More... | |
| virtual int | ProjectLocal (const Vector3< double > &point, HomgPoint2D &p2d, bool IgnoreDistortion=false) const |
| calculates the projection of a point in the local camera coordinate system to a pixel in the image plane of the camera. More... | |
| virtual bool | QValid () const |
| Check if current orientation is valid. More... | |
| virtual void | Rescale (double ratio, const double offset=0.0) |
| Adapt internal parameters to resampled image. More... | |
| virtual void | Rescale (unsigned int width, unsigned int height) |
| Adapt internal parameters to resampled image. More... | |
| virtual void | SetAspectratio (const double AspectRatio) |
| Set CCD cell-size in meter, virtual overload to recalculate K_. More... | |
| virtual void | SetC (const BIAS::Vector3< double > &C) |
| Set projection center. More... | |
| virtual void | SetCov (const Matrix< POSE_TYPE > &Cov) |
| Set pose covariance matrix with respect to C, Q. More... | |
| void | SetDistortionType (BIAS_ProjParaPersp_DISTORTION_TYPE distype) |
| Set type of distortion parameters. More... | |
| void | SetFocalLengthAndAspect (double f, double AspectRatio) |
| Set the current camera focal length in pixel and the a spect ratio. More... | |
| void | SetIdealImageSize (unsigned int width, unsigned int height) |
| virtual void | SetIdentifier (std::string name) |
| Set the identification string. More... | |
| virtual void | SetImageSize (const unsigned int w, const unsigned int h) |
| Set image dimensions (in pixels). More... | |
| int | SetIntrinsics (double minPhi, double maxPhi, double minTheta, double maxTheta, double angleStep, double aspectratio=1.0) |
| Method calculates K-Matrix and image size from specified angles. More... | |
| int | SetIntrinsics (Vector3< double > &p, Vector3< double > &q, unsigned int width, unsigned int height) |
| virtual void | SetK (const KMatrix &K) |
| sets the internal parameters from a given KMatrix and updates the cached K and its inverse More... | |
| void | SetMinZLocal (const double &minz) |
| sets minimum z value of unit-ray in local CCS to be accepted as in front of camera (e.g. More... | |
| virtual void | SetP (const PMatrix &P) |
| set from P More... | |
| virtual void | SetPose (const BIAS::Pose pose) |
| Set pose from pose object. More... | |
| virtual void | SetPoseParametrization (const BIAS::PoseParametrization &pp) |
| Set pose from pose parametrization. More... | |
| virtual void | SetPrincipal (const double x, const double y) |
| Set principal point in pixels relative to top left corner, virtual overload to recalculate K_. More... | |
| virtual void | SetQ (const BIAS::Quaternion< double > &Q) |
| Set orientation from unit quaternion Q. More... | |
| virtual void | SetQC (const BIAS::Quaternion< double > &Q, const BIAS::Vector3< double > &C) |
| Set pose from unit quaternion Q and projection center C. More... | |
| virtual void | SetR (const BIAS::RMatrix &R) |
| Set orientation from rotation matrix R. More... | |
| void | SetSimplePerspective (const double FoV=M_PI/2, const unsigned int width=512, const unsigned int height=512) |
| Sets the parameters for a simple perspective camera with imagesize 512x512, focal length 512 (fov = 90 deg.), princ.point (255.5,255.5) and without distortion. More... | |
| void | SetSkew (double skew) |
| Set the current camera skew factor. More... | |
| void | SetUndistortion (double kc1, double kc2) |
| void | SetUndistortion (double kc1, double kc2, double kc3, double kc4) |
| Set the lens undistortion parameters. More... | |
| void | SetUndistortionBrown (double kc1, double kc2, double kc3, double kc4, double r0) |
| Set the lens undistortion parameters including the root of the polynomial. More... | |
| void | SetUndistortionInverseRad (double kc1, double kc2, double kc3, double kc4) |
| void | SetUndistortionInverseRad3 (double kc1, double kc2, double kc3) |
| void | SetUndistortionRad3 (double kc1, double kc2, double kc3) |
| virtual void | SetVideoSourceType (const std::string &name) |
| Set the camera source type. More... | |
| virtual int | Transform_ (const Vector< double > &src, Vector< double > &dst) const |
| Worker function for Unscented Transform. More... | |
| int | TransformCartesianToPolarCoordinates (const BIAS::Image< float > &cartesianDepth, BIAS::Image< float > &polarDepth) |
| transforms an image from cartesian coordinates to polar coordinates More... | |
| float | TransformCartesianToPolarCoordinates (const HomgPoint2D &pos, const float depthCartesian) |
| transforms a depth value from cartesian coordinates to polar coordinates More... | |
| int | TransformPolarToCartesianCoordinates (const BIAS::Image< float > &polarDepth, BIAS::Image< float > &cartesianDepth) |
| transforms an image from polar coordinates to cartesian coordinates More... | |
| float | TransformPolarToCartesianCoordinates (const HomgPoint2D &pos, const float depthPolar) |
| transforms a depth value from polar coodinates to cartesian coordinates More... | |
| virtual bool | Undistort (BIAS::HomgPoint2D &point2d) const |
| Using the Matlab camera calibration toolbox parameters for an undistortion of distorted coordinates. More... | |
| virtual Matrix3x3< double > | UnProjectCovLocal (const HomgPoint2D &pos, const Matrix3x3< double > &cov2D, bool IgnoreDistortion=false, bool Normalize=false) |
| unprojects the covariance matrices to K=Identity camera Fast implementation for IgnorDistortion = true and Normalize = false More... | |
| virtual void | UnProjectLocal (const HomgPoint2D &pos, Vector3< double > &pointOnRay, Vector3< double > &direction, bool IgnoreDistortion=false) const |
| calculates the viewing ray from the camera center (in the camera coordinate system) which belongs to the image position pos with lens distortion e.g. More... | |
| HomgPoint3D | UnProjectToImagePlane (const HomgPoint2D &pos, const double &depth=1.0, bool IgnoreDistortion=false) const |
| map points from image onto unit diameter image plane in 3D. More... | |
| virtual HomgPoint3D | UnProjectToPoint (const HomgPoint2D &pos, double depth, bool IgnoreDistortion=false) const |
| calculates a 3D point in the global (not the rig) coordinate system, which belongs to the image position pos with distance depth to the camera center. More... | |
| virtual HomgPoint3D | UnProjectToPoint (const HomgPoint2D &pos, const double depth, const ProjectionParametersBase &proj, bool IgnoreDistortion=false) const |
| virtual HomgPoint3D | UnProjectToPointByZ (const HomgPoint2D &pos, const double &zDistance, bool IgnoreDistortion=false) const |
| virtual Vector3< double > | UnProjectToPointLocal (const HomgPoint2D &pos, const double &depth, bool IgnoreDistortion=false) const |
| calculates a 3D point in the local camera coordinate system, which belongs to the image position pos in cam with distance depth to the camera center cam. More... | |
| virtual void | UnProjectToRay (const HomgPoint2D &pos, Vector3< double > &origin, Vector3< double > &direction, bool ignoreDistortion=false) const |
| Calculates the view ray, which belongs to the given position on the image plane, in global coordinates. More... | |
| virtual void | UnProjectToRay (const HomgPoint2D &pos, Vector3< double > &direction, bool ignoreDistortion=false) const |
| Calculates the view ray, which belongs to the given position on the image plane, in global coordinates. More... | |
| virtual void | UnProjectToRay (const HomgPoint2D &pos, Vector3< double > &origin, Vector3< double > &direction, const ProjectionParametersBase &proj, bool ignoreDistortion=false) const |
| Calculates the view ray, which belongs to the given position on the image plane, using the given projection. More... | |
| void | UpdateMinZLocal () |
| run along image border and compute maximum field of view, save in minzlocal More... | |
| virtual void | ValidatePose () |
| Validate currently set pose. More... | |
| virtual double | ViewDifference (const ProjectionParametersBase *pPPB) const |
| compute scalar dissimilarity between two cameras based upon rough approximation of field of view overlap for pure rotation and penalty term for translation: 0=identical More... | |
| xmlNodePtr | XMLAdd (const xmlNodePtr Node, XMLIO &XMLObject) const |
| call this to add the class to a node of a given xml tree More... | |
| virtual int | XMLGetClassName (std::string &TopLevelTag, double &Version) const |
| specialization of XML block name function More... | |
| virtual int | XMLIn (const xmlNodePtr Node, XMLIO &XMLObject) |
| specialization of XML read function More... | |
| virtual int | XMLOut (const xmlNodePtr Node, XMLIO &XMLObject) const |
| specialization of XML write function More... | |
| int | XMLRead (const std::string &Filename) |
| derived classes must implement the function XMLIn which is called by this function XMLRead to read everything with name Filename into (*this). More... | |
| int | XMLReadFromString (const std::string &str) |
| reconstruct xml tree from string More... | |
| int | XMLWrite (const std::string &Filename, int CompressionLevel=0, bool AutoAddCompressionSuffix=true, std::string encoding="UTF-8") const |
| call this to add the class to a new xml tree and write it to the file Filename. More... | |
| int | XMLWriteToString (std::string &str, std::string encoding="UTF-8") const |
| serialize xml tree to string More... | |
| virtual | ~ProjectionParametersPerspective () |
Static Public Member Functions | |
| static std::string | GetRadialDistModelString (BIAS_ProjParaPersp_DISTORTION_TYPE model) |
Protected Member Functions | |
| void | AddDebugLevel (const long int lv) |
| void | AddDebugLevel (const std::string &name) |
| void | ComputeK_ () |
| computes the cached KMatrix and its inverse call after every parameter change More... | |
| int | ComputeSigmaPoints_ (const Vector< double > &src_mean, const Matrix< double > &src_cov, std::vector< WeightedSigmaPoint > &sigma_points) const |
| The covariance of a n-dimensional vector is approximated using 2n+1 so called sigma points with associated weights. More... | |
| long | ConsumeNextFreeDebuglevel_ () |
| returns the next available debuglevel More... | |
| bool | DebugLevelIsSet (const long int lv) const |
| bool | DebugLevelIsSet (const std::string &name) const |
| void | Distort_ (const double x, const double y, double &dist_x, double &dist_y) const |
| int | GetDebugLevel () const |
| std::ostream & | GetDebugStream () const |
| void | GetDebugStream (std::ostream &os) const |
| int | GetMinimalAngleInCorner_ (const HomgPoint2D &corner, double &minAngle) |
| Helper function for minimal angle step calculation. More... | |
| void | InitParams_ () |
| called from constructors to set zeros to most values More... | |
| long int | Name2DebugLevel (const std::string &name) const |
| looks up a debuglevel in the internal map, returns 0 if not found More... | |
| long int | NewDebugLevel (const std::string &name) |
| creates a new debuglevel More... | |
| void | PrintDebugLevel (std::ostream &os=std::cout) const |
| void | RemoveDebugLevel (const long int lv) |
| void | RemoveDebugLevel (const std::string &name) |
| void | SetAlpha (const double alpha) |
| Sets the alpha parameter. More... | |
| void | SetBeta (const double beta) |
| Sets the beta parameter. More... | |
| void | SetDebugLevel (const long int lv) |
| void | SetDebugLevel (const std::string &name) |
| void | SetDebugStream (const std::ostream &os) |
| void | SetUseSVD (const bool use_svd) |
| void | ShowDebugLevel (std::ostream &os=std::cout) const |
| prints all internally known debuglevels More... | |
| int | Transform (const Vector< double > &src_mean, const Matrix< double > &src_cov, Vector< double > &dst_mean, Matrix< double > &dst_cov) const |
| computes the second order approximation of the transformations of the mean and the associated covariance for the point transformation Transform_(). More... | |
| bool | Undistort_ (const double dist_x, const double dist_y, double &x, double &y) const |
Static Protected Member Functions | |
| static long int | GetGlobalDebugLevel () |
| static void | SetGlobalDebugLevel (long int lev) |
Protected Attributes | |
| long int | _liDebugLevel |
| long int | _liNextDebugLevel |
| new concept, debuglevel are managed here in the debug class More... | |
| std::map< std::string, long int > | _String2Debuglevel |
| double | Alpha_ |
| the alpha parameter determines the spread of the sigma points More... | |
| double | aspectratio_ |
| aspect ratio of the camera CCD More... | |
| double | Beta_ |
| beta is used to incorporate prior knowledge of the distribution of x. More... | |
| bool | CValid_ |
| BIAS_ProjParaPersp_DISTORTION_TYPE | distType_ |
| double | focallength_ |
| focal length is stored in pixel for cellSizeX More... | |
| unsigned int | height_ |
| height of image in pixels More... | |
| unsigned int | idealImageHeight_ |
| unsigned int | idealImageWidth_ |
| ideal image size More... | |
| std::string | identifier_ |
| Multifunctional identifier. More... | |
| KMatrix | invK_ |
| KMatrix | K_ |
| focal length, aspect ratio, principal point in K_, inverse in invK_ More... | |
| double | Kappa_ |
| kappa is a secondary scaling parameter. More... | |
| double | kc1_ |
| lens undistortion parameters after Bouquet also used as parameters for distortion after Brown(?) More... | |
| double | kc2_ |
| double | kc3_ |
| double | kc4_ |
| double | minZlocal_ |
| rigorously clip unit rays in CCS with z smaller than this values More... | |
| Pose | Pose_ |
| pose More... | |
| double | principalX_ |
| principal point in pixel coordinates (one for all zoom settings) More... | |
| double | principalY_ |
| bool | QValid_ |
| validity flag for orientation and position More... | |
| double | r0_ |
| double | skew_ |
| skew calibration parameter More... | |
| bool | UseSVD_ |
| bool | ustIgnoreDistortion_ |
| bool | ustNormalize_ |
| bool | ustTransformIntoImage_ |
| unscented transform worker variables More... | |
| std::string | videoSourceType_ |
| unsigned int | width_ |
| width of image in pixels More... | |
Static Protected Attributes | |
| static std::ostream | _zDebugStream |
| static long int | GlobalDebugLevel = 0 |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const ProjectionParametersPerspective &p) |
camera parameters which define the mapping between rays in the camera coordinate system and pixels in the image as well as external pose
Definition at line 57 of file ProjectionParametersPerspective.hh.
|
inline |
Definition at line 61 of file ProjectionParametersPerspective.hh.
|
inlineexplicit |
Definition at line 68 of file ProjectionParametersPerspective.hh.
|
inline |
Definition at line 77 of file ProjectionParametersPerspective.hh.
|
inlinevirtual |
Definition at line 122 of file ProjectionParametersPerspective.hh.
|
inlineinherited |
Definition at line 355 of file Debug.hh.
Referenced by BIAS::GLProjectionParametersBase::AddDebugLevel(), BIAS::Triangulation::CorrectCorrespondences(), BIAS::FilterBase< InputStorageType, OutputStorageType >::FilterBase(), BIAS::ShowCamWxVideoSourceFactory::OpenDevice(), and BIAS::SceneOpenSceneGraph::SceneOpenSceneGraph().
|
inlineinherited |
|
inlinevirtual |
covariant virtual copy constructor for use in Projection
Implements BIAS::ProjectionParametersBase.
Reimplemented in BIAS::ProjectionParametersPerspectiveDepth.
Definition at line 228 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::Projection::Load().
|
protected |
computes the cached KMatrix and its inverse call after every parameter change
Definition at line 760 of file ProjectionParametersPerspective.cpp.
|
protectedinherited |
The covariance of a n-dimensional vector is approximated using 2n+1 so called sigma points with associated weights.
The points and weights are computed in this function
Definition at line 138 of file UnscentedTransform.cpp.
References BIAS::UnscentedTransform::Alpha_, BIAS::UnscentedTransform::Beta_, BIAS::Debug::DebugLevelIsSet(), BIAS::Matrix< T >::GetCol(), BIAS::Matrix< T >::GetCols(), BIAS::UnscentedTransform::Kappa_, Lapack_Cholesky_SymmetricPositiveDefinit(), BIAS::Less(), TNT::Matrix< T >::num_cols(), TNT::Matrix< T >::num_rows(), BIAS::Vector< T >::Size(), BIAS::SVD::SqrtT(), and BIAS::UnscentedTransform::UseSVD_.
Referenced by BIAS::UnscentedTransform::Transform().
|
inlineprotectedinherited |
|
inlinevirtualinherited |
Check of current projection center is valid.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 673 of file ProjectionParametersBase.hh.
|
inlineinherited |
Definition at line 341 of file Debug.hh.
Referenced by BIAS::GenSynthMatches::_AddUniformDistributedOutliers(), BIAS::GenSynthMatches::_CreateCamMovement(), BIAS::GenSynthMatches::_CreateStatic2DPoints(), BIAS::UnscentedTransform::ComputeSigmaPoints_(), BIAS::Triangulation::CorrectCorrespondences(), BIAS::GenSynthMatches::GetGTNormalizedF(), BIAS::MonteCarloTransform::GetSamples_(), and BIAS::MonteCarloTransform::Transform().
|
inlineinherited |
|
virtual |
Using the Matlab camera calibration toolbox parameters for a distortion of undistorted coordinates.
Inverse to the undistort function. TODO: faster implementation via Lookup-table
Implements BIAS::ProjectionParametersBase.
Definition at line 313 of file ProjectionParametersPerspective.cpp.
References BIAS::DISTYPE_INVERSE_RAD.
|
inlineprotected |
Definition at line 758 of file ProjectionParametersPerspective.hh.
References distType_, BIAS::DISTYPE_BROWN, BIAS::DISTYPE_DEF, BIAS::DISTYPE_INVERSE_RAD, BIAS::DISTYPE_INVRAD3, BIAS::DISTYPE_NONE, BIAS::DISTYPE_RAD3, BIAS::DISTYPE_RADIAL, kc1_, kc2_, kc3_, kc4_, and r0_.
| int ProjectionParametersPerspective::DistortNormalized | ( | BIAS::HomgPoint2D & | point2d | ) | const |
Undistort distorted coordinates using the standard distortion parameters and the parameter describing the second constant root of the distortion polynomial of the radial symmetric distortion.
In contrast to the the bouguet way of calculating the radial symmetric distortion by using the polynomial raddist = 1 + kc1 * r^2 + kc2 * r^4 the "brown" way uses a modyfied polynomial which has a second root. the second constant root of the polynomial is implemented by subtracting the constant term rc from raddist with rc = kc1 * r0^2 + kc2 * r0^4 r0 is the parameter describing the root of the polynomial. (For details see: Luhmann, Nahbereichsphotogrammetrie. page. 121 )
Definition at line 293 of file ProjectionParametersPerspective.cpp.
References BIAS::DISTYPE_INVERSE_RAD, BIAS::HomgPoint2D::Homogenize(), and BIAS::HomgPoint2D::IsAtInfinity().
|
virtualinherited |
Checks if 3D point projects into specified image and returns belonging 2D image point.
| X | assumes homogenized point! |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 223 of file ProjectionParametersBase.cpp.
References BIAS::HomgPoint3D::GetEuclidean().
Referenced by BIAS::ImageBlender::BlendImages(), BIAS::ImageBlenderIncremental::BlendImages(), BIAS::ImageBlender::CheckFov(), BIAS::ImageBlenderIncremental::CheckFov_(), and BIAS::EpipolarLine::DrawDistortedLine().
|
virtual |
Checks if 3D point projects into specified image and returns belonging 2D image point.
| localX | assumes homogenized point! |
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 169 of file ProjectionParametersPerspective.cpp.
References BIAS::Vector3< T >::NormL2().
|
virtualinherited |
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 257 of file ProjectionParametersBase.cpp.
References BIAS::ProjectionParametersBase::CValid_, BIAS::Equal(), BIAS::ProjectionParametersBase::GetC(), BIAS::ProjectionParametersBase::GetR(), and BIAS::ProjectionParametersBase::QValid_.
|
virtual |
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 148 of file ProjectionParametersPerspective.cpp.
References BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), focallength_, kc1_, kc2_, kc3_, and kc4_.
|
inlinevirtualinherited |
Return aspectratio (i.e.
cellsizeX / cellsizeY).
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 582 of file ProjectionParametersBase.hh.
Referenced by BIAS::PlanarRectification< InputStorageType, OutputStorageType >::DetermineRectificationParameters_(), BIAS::VideoSource_Controller_Kinect::OnLoadCalib(), and BIAS::operator<<().
|
inlinevirtualinherited |
Get projection center.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 464 of file ProjectionParametersBase.hh.
Referenced by BIAS::GLProjectionParametersBase::Assign(), BIAS::clfTrimmedICP::Compute(), BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::Disp2Depth(), BIAS::ProjectionParametersBase::DoExtrinsicsDiffer(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::TriangleMesh::GenerateTexturedCamera(), BIAS::GLProjectionParametersBase::GetExtrinsics(), BIAS::ProjectionParametersBase::IsLeftOf(), BIAS::glfMatrix::MakeViewMatrix(), BIAS::operator<<(), BIAS::RenderContextBase::Render(), BIAS::Projection3DData::Set(), BIAS::MultipleDepthWarp::SetupNViewsWarp(), BIAS::Triangulation::Triangulate(), BIAS::PMDWarp::UseProjectiveTexturing(), BIAS::ProjectionParametersCylindric::ViewDifference(), BIAS::ProjectionParametersSphericalFast::ViewDifference(), BIAS::ProjectionParametersSpherical::ViewDifference(), BIAS::ProjectionParametersProjective::ViewDifference(), and ViewDifference().
|
inlinevirtualinherited |
Return pose covariance as 7x7 matrix with respect to C, Q.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 500 of file ProjectionParametersBase.hh.
|
inlinevirtualinherited |
Return pose as 7 vector (first projection center C, then unit quaternion Q representing orientation).
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 485 of file ProjectionParametersBase.hh.
| bool ProjectionParametersPerspective::GetCutOutParameters | ( | const Vector2< int > & | centerPoint, |
| const unsigned int | halfWidth, | ||
| const unsigned int | halfHeight, | ||
| ProjectionParametersPerspective & | cutOutParams | ||
| ) | const |
Shifts the principle point so that imagePoint-(halfWidth, halfHeight) is mapped to (0,0).
Image size is adapted to halfWidth*2+1 and halfHeight*2+1. Distortion parameters are applied in normalized coords hence they keep their validity.
Definition at line 34 of file ProjectionParametersPerspective.cpp.
References BIAS::ProjectionParametersBase::height_, SetPrincipal(), and BIAS::ProjectionParametersBase::width_.
|
inlineinherited |
Definition at line 332 of file Debug.hh.
Referenced by BIAS::listenthread(), BIAS::Image< StorageType >::operator=(), and BIAS::ImageBase::operator=().
|
inlineinherited |
|
inlineinherited |
|
inline |
Get type of distortion parameters.
Definition at line 358 of file ProjectionParametersPerspective.hh.
|
inlinevirtualinherited |
Return cached 3x4 representation of external matrix [R|C].
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 533 of file ProjectionParametersBase.hh.
Referenced by BIAS::EpipolarLine::ProjectEpipolarPlane().
|
virtualinherited |
Returns a fake KMatrix for the camera.
The FoV of the KMatrix is specified by maxangle (PI*80/180 for 160deg) or the max angle, if this is <160deg.
| resolution | The resolution parameter influences the Resolution of the perspective image that is represented by the camera. 0 - The perspective image has the same size as the this image 1 - The perspective image has the same resolution as this image in the center (highest resolution) 2 - The perspective image has the same resolution as this image near the border (lowest resolution) |
| imgsize | returns the image size |
| maxangle | maximum theta in rad, e.g. (PI*80/180 for 160deg fov) |
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, BIAS::ProjectionParametersSpherical, and BIAS::ProjectionParametersSphericalFast.
Definition at line 544 of file ProjectionParametersBase.cpp.
References BIAS::Vector3< T >::Set(), and BIAS::Matrix3x3< T >::SetIdentity().
Referenced by BIAS::ProjectionParametersSphericalFast::GetFakeKMatrix(), and BIAS::ProjectionParametersSpherical::GetFakeKMatrix().
|
virtualinherited |
|
virtualinherited |
call this to start a run at the outer boundary of an image.
You get the first boundary position in it, e.g. (0,0) for a perspective image. Feed this into GetNextBorderPixel to get the next position.
Reimplemented in BIAS::ProjectionParametersSphericalFast, BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersSpherical.
Definition at line 67 of file ProjectionParametersBase.cpp.
References BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
Referenced by BIAS::ImageBlender::BlendImages(), BIAS::ImageBlenderIncremental::BlendImages(), BIAS::ImageBlender::CheckFov(), and BIAS::ImageBlenderIncremental::CheckFov_().
|
virtualinherited |
call this to start a run at the outer boundary of an image.
You get the first edge position i.e. (-0.5, -0.5) for a perspective image. Feed this into GetNextBorderPixel to get the next position.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 107 of file ProjectionParametersBase.cpp.
References BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
|
inline |
Get the current camera focal length.
Definition at line 246 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::VideoSource_Controller_Kinect::OnLoadCalib().
|
inline |
Returns the focal length.
Definition at line 255 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_().
| Matrix4x4< double > ProjectionParametersPerspective::GetGLModelviewProjectionMatrix | ( | const double | zNear, |
| const double | zFar, | ||
| const bool | flip, | ||
| const bool | transpose = false |
||
| ) |
Calculates an ModelViewProjection matrix useable in OpenGL.
| zNear | defines the near z-clipping plane. |
| zFar | defines the far z-clipping plane. |
| flip | reading out the framebuffer into a bias image implicitly flips the image, when this can be remedied by (pre)flipping in the projection matrix - however when rendering onscreen, the visible image will be flipped then. |
Definition at line 963 of file ProjectionParametersPerspective.cpp.
References BIAS::Matrix4x4< T >::Mult(), and BIAS::Matrix4x4< T >::Transpose().
|
inlinestaticinherited |
| Matrix4x4< double > ProjectionParametersPerspective::GetGLProjectionMatrix | ( | const double | zNear, |
| const double | zFar, | ||
| const bool | flip, | ||
| const bool | transpose = false |
||
| ) |
Calculates an projection matrix useable in OpenGL.
| zNear | defines the near z-clipping plane. |
| zFar | defines the far z-clipping plane. |
| flip | reading out the framebuffer into a bias image implicitly flips the image, when this can be remedied by (pre)flipping in the projection matrix - however when rendering onscreen, the visible image will be flipped then. |
Definition at line 981 of file ProjectionParametersPerspective.cpp.
| Matrix4x4< double > ProjectionParametersPerspective::GetGLProjectionMatrix | ( | const double | zNear, |
| const double | zFar, | ||
| const Vector2< unsigned int > | upperLeft, | ||
| const unsigned int | width, | ||
| const unsigned int | height, | ||
| const bool | flip, | ||
| const bool | transpose = false |
||
| ) |
Calculates an projection matrix useable in OpenGL.
The viewing frustum encloses the image all optical rays passing through the image region specified by the parameters upperLeft, width and height.
| zNear | defines the near z-clipping plane. |
| zFar | defines the far z-clipping plane. |
| upperLeft | specifies the image positions of the upper left "visible" optical ray. |
| width | specifies the x-component of the image position of the lower right "visible" optical ray. |
| height | specifies the y-component of the image position of the lower right "visible" optical ray. |
| flip | reading out the framebuffer into a bias image implicitly flips the image, when this can be remedied by (pre)flipping in the projection matrix - however when rendering onscreen, the visible image will be flipped then. |
Definition at line 991 of file ProjectionParametersPerspective.cpp.
References BIAS::Matrix< T >::SetZero(), and BIAS::Matrix4x4< T >::Transpose().
| void ProjectionParametersPerspective::GetIdealImageSize | ( | unsigned int & | width, |
| unsigned int & | height | ||
| ) | const |
Definition at line 753 of file ProjectionParametersPerspective.cpp.
Referenced by BIAS::DistortionRendering::Init(), BIAS::glfMatrix::MakeProjectionMatrix(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
| void ProjectionParametersPerspective::GetIdealK | ( | KMatrix & | K | ) | const |
Definition at line 527 of file ProjectionParametersPerspective.cpp.
References BIAS::HomgPoint2D, BIAS::HomgPoint2D::Homogenize(), and BIAS::Matrix3x3< T >::SetIdentity().
Referenced by BIAS::OutputLensDistortion::CreateLookupTable(), BIAS::DistortionRendering::Init(), BIAS::glfMatrix::MakeProjectionMatrix(), BIAS::glfMatrix::MakeProjectionMatrixNew(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inlinevirtualinherited |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 573 of file ProjectionParametersBase.hh.
Referenced by BIAS::operator<<(), and BIAS::wxProjectionPanel::SetProjection().
|
inlinevirtualinherited |
Returns the image height.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 568 of file ProjectionParametersBase.hh.
|
inlinevirtualinherited |
Obtain image dimensions.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 545 of file ProjectionParametersBase.hh.
Referenced by BIAS::MultipleDepthWarp::ChangeTargetCam(), BIAS::OutputLensDistortion::CreateLookupTable(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesCylindric_(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesPerspective_(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesSpherical_(), BIAS::RectificationViaProjectionMappingBase< InputStorageType, OutputStorageType >::Disp2Depth(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::PMDImageProc::FitDepthTo2DImage(), BIAS::TriangleMesh::GenerateSimplifiedMesh(), BIAS::TriangleMesh::GenerateTexturedCamera(), BIAS::DistortionRendering::Init(), BIAS::ImageWarper< StorageType >::Init(), BIAS::PMDWarp::Init(), BIAS::Primitives::LocalNormalizedPointCloud(), BIAS::Primitives::LocalNormalizedTriangleMesh(), BIAS::Primitives::LocalNormalizedTriangleStrip(), BIAS::Primitives::LocalNormalizedVertexCloud(), BIAS::Primitives::LocalPerspectivePatches(), BIAS::Primitives::LocalPerspectivePatchOverLine(), BIAS::Primitives::LocalPerspectiveQuad(), BIAS::glfMatrix::MakeProjectionMatrix(), BIAS::glfMatrix::MakeProjectionMatrixNew(), BIAS::glfMatrix::MakeTextureMatrix(), BIAS::glfMatrix::MakeTextureMatrixNew(), BIAS::operator<<(), BIAS::Projection3DData::Set(), BIAS::GLProjectionParametersPerspective::SetGLMatrices(), BIAS::ImageBlenderIncremental::SetOutputParameters(), BIAS::ForwardMappingNearestNeighbour< InputStorageType, OutputStorageType >::SetSinkCam(), BIAS::ForwardMappingNearestNeighbour< InputStorageType, OutputStorageType >::SetSourceCam(), BIAS::ImageWarper< StorageType >::SetTargetCamera(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inlinevirtualinherited |
Returns the image width.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 557 of file ProjectionParametersBase.hh.
|
inlinevirtual |
Definition at line 488 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::OutputLensDistortion::CreateLookupTable(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::DistortionRendering::Init(), BIAS::glfMatrix::MakeProjectionMatrixNew(), BIAS::glfMatrix::MakeTextureMatrix(), BIAS::glfMatrix::MakeTextureMatrixNew(), and BIAS::operator<<().
|
inlinevirtual |
Definition at line 494 of file ProjectionParametersPerspective.hh.
|
protected |
Helper function for minimal angle step calculation.
Definition at line 54 of file ProjectionParametersPerspective.cpp.
References BIAS::Vector3< T >::Normalize(), BIAS::Vector3< T >::NormL2(), and BIAS::Vector3< T >::ScalarProduct().
|
virtual |
Delivers the assumed minimal angular distance between two optical rays belonging to integer image coordinates within the FoV.
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 110 of file ProjectionParametersPerspective.cpp.
Referenced by BIAS::PlanarRectification< InputStorageType, OutputStorageType >::DetermineRectificationParameters_().
|
inline |
minimum z value of ray in image (if computed already)
Definition at line 589 of file ProjectionParametersPerspective.hh.
|
virtualinherited |
call this iteratively to run at the outer boundary of an image.
All returned coordinates must have valid local rays in the camera coordinate system (e.g. in fisheye cams, we run at the fov circle) and must be in the image. Two subsequent coordinates must not be more distant than 1 pixel.
| it | must be initialized by GetFirstBorderPixel |
Reimplemented in BIAS::ProjectionParametersSphericalFast, BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersSpherical.
Definition at line 74 of file ProjectionParametersBase.cpp.
References BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
Referenced by BIAS::ImageBlender::BlendImages(), BIAS::ImageBlenderIncremental::BlendImages(), BIAS::ImageBlender::CheckFov(), and BIAS::ImageBlenderIncremental::CheckFov_().
|
virtualinherited |
call this iteratively to run at the outer edge of an image.
Like the GetNextBorderPixel() method, however runs along the outer rim of an image, i.e. the coordinate range (-0.5, -0.5) and (W-0.5, H-0.5). The positions returned are the upper left corner of the pixels. These are at the same time the upper right corners of the neighboring pixel.
| it | must be initialized by GetFirstBorderPixel |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 114 of file ProjectionParametersBase.cpp.
References BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
|
inlinevirtual |
Definition at line 482 of file ProjectionParametersPerspective.hh.
References BIAS::PMatrix.
|
inlinevirtualinherited |
Return complete pose object.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 505 of file ProjectionParametersBase.hh.
Referenced by BIAS::Projection::AddAbsoluteCamera(), BIAS::ThreeDOut::AddProjection(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesCylindric_(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesPerspective_(), BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesSpherical_(), BIAS::Projection::GetParameterCloneWithAbsolutePose(), BIAS::CylindricDepthPanorama::Init(), BIAS::glfMatrix::MakeTextureMatrix(), BIAS::glfMatrix::MakeTextureMatrixNew(), BIAS::glfMatrix::MakeViewMatrixNew(), BIAS::operator<<(), BIAS::CylindricDepthTrackingPanorama::ProcessCylindricProjection(), BIAS::GLProjectionParametersPerspective::SetIntrinsics(), and BIAS::PMDWarp::UseProjectiveTexturing().
|
inlinevirtualinherited |
Return copy of pose parametrization object.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 517 of file ProjectionParametersBase.hh.
|
inlinevirtualinherited |
Get principal point (in pixels relative to top left corner).
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 587 of file ProjectionParametersBase.hh.
Referenced by BIAS::CylindricalRectification< InputStorageType, OutputStorageType >::DetermineCylindricCameraBoundriesSpherical_(), BIAS::ProjectionParametersPerspectiveDepth::DistortReflectivity(), BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_(), BIAS::VideoSource_Controller_Kinect::OnLoadCalib(), and BIAS::ProjectionParametersPerspectiveDepth::UnDistortReflectivity().
|
inlinevirtualinherited |
Get orientation as unit quaternion.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 474 of file ProjectionParametersBase.hh.
Referenced by BIAS::operator<<().
|
virtualinherited |
Get orientation as rotation matrix R.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 282 of file ProjectionParametersBase.cpp.
References BIAS::RMatrixBase::SetFromQuaternion().
Referenced by BIAS::GLProjectionParametersBase::Assign(), BIAS::clfTrimmedICP::Compute(), BIAS::ProjectionParametersBase::DoExtrinsicsDiffer(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::GLProjectionParametersBase::GetExtrinsics(), BIAS::glfMatrix::MakeViewMatrix(), BIAS::Projection3DData::Set(), BIAS::ProjectionParametersSphericalSimple::ValidatePose(), BIAS::ProjectionParametersCylindric::ViewDifference(), BIAS::ProjectionParametersSphericalFast::ViewDifference(), BIAS::ProjectionParametersSpherical::ViewDifference(), ViewDifference(), and BIAS::ProjectionParametersSphericalSimple::XMLIn().
|
static |
Definition at line 375 of file ProjectionParametersPerspective.cpp.
References BIAS::DISTYPE_BROWN, BIAS::DISTYPE_DEF, BIAS::DISTYPE_INVERSE_RAD, BIAS::DISTYPE_NONE, and BIAS::DISTYPE_RADIAL.
|
inline |
Obtain the current camera skew factor.
Definition at line 329 of file ProjectionParametersPerspective.hh.
|
virtualinherited |
Determines the maximal and minimal viewing range in means of spherical coordinates.
The spherical coordinates are calculated relatively to the passed coordinate frame. The method is using the class SphericalCoordinates, see also the documentation there in order to understand the meaning of the sphericalReferenceFrame.
| sphericalReferenceFrame | reference frame for the calculation of spherical coordinates belonging to optical rays, must be defined in the same coordinate frame like the local frame of the ProjectionParameters. |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 148 of file ProjectionParametersBase.cpp.
References BIAS::CoordinateTransform3D::BecomeRelativeTransform(), BIAS::CoordinateTransform3D::GetC(), BIAS::SphericalCoordinates::GetCartesianRayFromFullPhi(), BIAS::HomgPoint3D::GetEuclidean(), BIAS::SphericalCoordinates::GetSphericalCoordinatesFullPhi(), BIAS::Vector3< T >::NormL2(), BIAS::HomgPoint3D::Set(), BIAS::SphericalCoordinates::SetAffineBase(), BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
Referenced by BIAS::PlanarRectification< InputStorageType, OutputStorageType >::DetermineRectificationParameters_().
|
inline |
Definition at line 259 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::GLProjectionParametersPerspective::InitShaders_(), BIAS::PMDWarp::SetTargetCameraParameters(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inline |
Definition at line 268 of file ProjectionParametersPerspective.hh.
|
inline |
Get the lens undistortion parameters including the parameter describing root of the polynomial.
Definition at line 441 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_BROWN.
|
inline |
Definition at line 425 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_INVERSE_RAD.
|
inline |
Definition at line 468 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_INVRAD3.
|
inline |
Definition at line 457 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_RAD3.
|
virtualinherited |
Get warp (local magnification/shear/...) when going from the real image to ideal image with focal length = 1.
When an image is undistorted to an ideal perspective camera with K=id, the region around each pixel must be warped. For perspective cameras without radial distortion this is the undoing (inverse) of the upper 2x2 part of the KMatrix (simply a rescale of coordinates). If radial distortion is present, the local warp depends on the image position. Same for most other camera models. This matrix is closely related to the absolute local image resolution.
Instead of going to the w=1 (homogenized) ideal image, we can as well go to a tangent image. This can be steered by the parameter homogenized (if false, we use normalized mode).
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 632 of file ProjectionParametersBase.cpp.
References BIAS::Vector3< T >::CrossProduct(), BIAS::HomgPoint2D::IsHomogenized(), BIAS::MatrixIdentity, BIAS::Vector3< T >::Normalize(), BIAS::Vector3< T >::NormL2(), and BIAS::RMatrixBase::Set().
|
inlinevirtualinherited |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 577 of file ProjectionParametersBase.hh.
|
inlineprotected |
called from constructors to set zeros to most values
Definition at line 658 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_DEF.
|
inlinevirtualinherited |
Invalidate currently set pose.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 683 of file ProjectionParametersBase.hh.
|
inline |
Definition at line 279 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::EpipolarLine::DrawDistortedLine().
|
inherited |
Returns true if the camera represented by this ProjectionParametersBase is left of the given one.
Computes the baseline vector and rotates it so that this cam would have zero rotation. This cam is left of the given one if the x component of the transformed baseline is non-negative.
Note that the orientation of the given camere is not considered, only its position.
| ppb | the parameters of the cam to compare this to |
Definition at line 711 of file ProjectionParametersBase.cpp.
References BIAS::ProjectionParametersBase::GetC(), and BIAS::Matrix3x3< T >::GetInverse().
|
inlineinherited |
Looks at given point, similar to gluLookAt.
| eye | Eye coordinate |
| center | 3D point to look at |
| up | Up vector of the camera |
Definition at line 751 of file ProjectionParametersBase.hh.
|
inlineinherited |
Looks at given point, similar to gluLookAt.
| center | 3D point to look at |
| up | Up vector of the camera |
Definition at line 760 of file ProjectionParametersBase.hh.
|
inlineinherited |
Looks at given point, similar to gluLookAt.
| eye | Eye coordinate |
| center | 3D point to look at |
| up | Up vector of the camera |
Definition at line 770 of file ProjectionParametersBase.hh.
|
inlineinherited |
Looks at given point, similar to gluLookAt.
| center | 3D point to look at |
| up | Up vector of the camera |
Definition at line 779 of file ProjectionParametersBase.hh.
|
inlineinherited |
|
inlineinherited |
creates a new debuglevel
Definition at line 474 of file Debug.hh.
Referenced by BIAS::COSAC< SolutionType >::COSAC(), BIAS::ProjectionParametersPerspectiveDepth::Init(), BIAS::MonteCarloTransform::MonteCarloTransform(), BIAS::PMatrixEstimation::PMatrixEstimation(), BIAS::PreemptiveRANSAC< SolutionType >::PreemptiveRANSAC(), BIAS::RANSACPreKnowledge< SolutionType >::RANSACPreKnowledge(), BIAS::ROI::ROI(), BIAS::RotationAveraging::RotationAveraging(), BIAS::SceneOpenSceneGraph::SceneOpenSceneGraph(), BIAS::ThreeDOutOpenSceneGraph::ThreeDOutOpenSceneGraph(), BIAS::Triangulation::Triangulation(), and BIAS::UnscentedTransform::UnscentedTransform().
|
inline |
Definition at line 82 of file ProjectionParametersPerspective.hh.
References distType_, focallength_, idealImageHeight_, idealImageWidth_, invK_, K_, kc1_, kc2_, kc3_, kc4_, minZlocal_, BIAS::ProjectionParametersBase::operator=(), r0_, and skew_.
Referenced by BIAS::GLProjectionParametersPerspective::GLProjectionParametersPerspective(), BIAS::GLProjectionParametersPerspective::operator=(), BIAS::ProjectionParametersPerspectiveDepth::operator=(), BIAS::GLProjectionParametersPerspective::Set(), and BIAS::GLProjectionParametersPerspective::SetIntrinsics().
|
inlinevirtualinherited |
Check if current pose is valid.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 679 of file ProjectionParametersBase.hh.
Referenced by BIAS::IOUtils::GetProjection(), and BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam().
|
inlineinherited |
|
inlinevirtualinherited |
calculates the projection of a point in the world coordinate system to a pixel in the image plane of the camera !warning! the function my return an invalid point (0,0,0) in certain cases (3d point) behind camera or 3d point to close to camera center
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 221 of file ProjectionParametersBase.hh.
References BIAS::Vector3< T >::Mult().
|
inlinevirtualinherited |
calculates the projection of a point in the world coordinate system to a pixel in the image plane of the camera.
The only case when this function may not compute the 2d point is when the camera center and the 3d point coincide. This case must be indicated by a negative return value. In all other cases, a valid 2d point is computed, particularily when the 3d point is behind the camera or when the resulting 2d point is at infinity. returns negative, when 3d point and camera center coincide
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 237 of file ProjectionParametersBase.hh.
References BIAS::Vector3< T >::Mult().
|
virtual |
calculates the projection of a point in the camera coordinate system to a pixel in the image plane of the camera with lens distortion In the simplest case perspective pinhole projection x = K * y where y is the projection of X using y = (R^T | -R^T C) X
Implements BIAS::ProjectionParametersBase.
Definition at line 194 of file ProjectionParametersPerspective.cpp.
References BIAS::DISTYPE_INVERSE_RAD, BIAS::HomgPoint2D, and BIAS::HomgPoint2D::Homogenize().
Referenced by BIAS::EpipolarLine::DrawDistortedLine().
|
virtual |
calculates the projection of a point in the local camera coordinate system to a pixel in the image plane of the camera.
The only case when this function may not compute the 2d point is when the camera center and the 3d point coincide. This case must be indicated by a negative return value. In all other cases, a 2d point must be computed, particularily when the 3d point is behind the camera or when the resulting 2d point is at infinity.
In the simplest case perspective pinhole projection x = K * point where point is transformed of X using point = (R^T | -R^T C) X
Implements BIAS::ProjectionParametersBase.
Definition at line 217 of file ProjectionParametersPerspective.cpp.
References BIAS::HomgPoint2D::Homogenize(), BIAS::Vector3< T >::NormL2(), and BIAS::HomgPoint2D::Set().
|
inlinevirtualinherited |
Check if current orientation is valid.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 676 of file ProjectionParametersBase.hh.
|
inlineinherited |
|
inlineinherited |
|
inlinevirtual |
Adapt internal parameters to resampled image.
| ratio | 2.0 = downsample by 2, 0.5 = upsample by 2 |
| offset | Offset for principal point (applied before down/upsampling!) |
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 526 of file ProjectionParametersPerspective.hh.
References BIAS::ProjectionParametersBase::Rescale().
Referenced by BIAS::GLProjectionParametersPerspective::Rescale_().
|
inlinevirtual |
Adapt internal parameters to resampled image.
Allows to rescale to different aspect ratio.
| width | new image width |
| height | new image height |
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 539 of file ProjectionParametersPerspective.hh.
References BIAS::ProjectionParametersBase::Rescale().
|
inlineinherited |
Sets the alpha parameter.
The alpha parameter determines the spread of the sigma points
Definition at line 80 of file UnscentedTransform.hh.
|
inlinevirtual |
Set CCD cell-size in meter, virtual overload to recalculate K_.
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 344 of file ProjectionParametersPerspective.hh.
References BIAS::ProjectionParametersBase::SetAspectratio().
|
inlineinherited |
Sets the beta parameter.
beta is used to incorporate prior knowledge of the distribution of x. For Gaussian distributions beta = 2.0 is optiomal
Definition at line 86 of file UnscentedTransform.hh.
|
inlinevirtualinherited |
Set projection center.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 648 of file ProjectionParametersBase.hh.
Referenced by BIAS::clfTrimmedICP::Compute(), BIAS::ImageBlender::ComputeCylCamGeometry(), BIAS::ImageBlenderIncremental::ComputeCylCamGeometry_(), BIAS::ProjectionParametersFactory::Create(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::GLProjectionParametersBase::SetExtrinsics(), BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam(), and BIAS::MultipleDepthWarp::SetupNViewsWarp().
|
inlinevirtualinherited |
Set pose covariance matrix with respect to C, Q.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 669 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters().
|
inlineinherited |
Definition at line 318 of file Debug.hh.
Referenced by BIAS::ShowCamWxVideoSourceFactory::CreateBumbleBee(), BIAS::ShowCamWxVideoSourceFactory::CreateDCAM(), BIAS::VideoSource_MDcam::ScanBus(), BIAS::GLProjectionParametersBase::SetDebugLevel(), BIAS::VideoSource_Disk::VideoSource_Disk(), BIAS::VideoSource_DV2::VideoSource_DV2(), BIAS::VideoSource_DV::VideoSource_DV_Internal_Init_(), and BIAS::VideoSource_V4L::VideoSource_V4L().
|
inlineinherited |
|
inlineinherited |
|
inline |
Set type of distortion parameters.
Definition at line 351 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::Projection::CreatePerspective().
|
inline |
Set the current camera focal length in pixel and the a spect ratio.
Definition at line 315 of file ProjectionParametersPerspective.hh.
References BIAS::ProjectionParametersBase::SetAspectratio().
Referenced by BIAS::ProjectionParametersFactory::Create(), BIAS::Projection::CreatePerspective(), BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_(), BIAS::ProjectionParametersSphericalFast::GetPerspectiveCutOutParameters(), and BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters().
|
inlinestaticinherited |
| void ProjectionParametersPerspective::SetIdealImageSize | ( | unsigned int | width, |
| unsigned int | height | ||
| ) |
Definition at line 593 of file ProjectionParametersPerspective.cpp.
Referenced by BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inlinevirtualinherited |
Set the identification string.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 616 of file ProjectionParametersBase.hh.
|
inlinevirtualinherited |
Set image dimensions (in pixels).
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 609 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersFactory::Create(), BIAS::Projection::CreatePerspective(), BIAS::Projection::CreateSpherical(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_(), BIAS::TriangleMesh::GenerateDenseMesh(), BIAS::ProjectionParametersSphericalFast::GetPerspectiveCutOutParameters(), BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters(), BIAS::Projection::Load(), BIAS::Camera< StorageType >::ParseMetaData(), BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
| int ProjectionParametersPerspective::SetIntrinsics | ( | double | minPhi, |
| double | maxPhi, | ||
| double | minTheta, | ||
| double | maxTheta, | ||
| double | angleStep, | ||
| double | aspectratio = 1.0 |
||
| ) |
Method calculates K-Matrix and image size from specified angles.
Angle phi is determining the opening angle and the principle point shift in y direction, while theta is determining the opening angle and the principle point shift in x direction. angleStep is used to derive the resolution, hence the focallength and the aspectratio. The K-Matrix is free of skew.
Valid values for phi are (-M_PI/2, M_PI/2), while theta must lie within (0,M_PI). Phi's reference direction is the A-Vector, theta's is the -H-Vector (negated H-Vector). The extrinsics are left unchanged (which you certainly guessed already).
Definition at line 600 of file ProjectionParametersPerspective.cpp.
References BIAS::SphericalCoordinates::GetCartesianRayFromFullPhi(), BIAS::HomgPoint3D::GetEuclidean(), BIAS::CoordinateTransform3D::RotateLocalFrame(), and BIAS::SphericalCoordinates::SetAffineBase().
Referenced by BIAS::PlanarRectification< InputStorageType, OutputStorageType >::DetermineRectificationParameters_(), and BIAS::MultipleDepthWarp::SetupNViewsWarp().
| int ProjectionParametersPerspective::SetIntrinsics | ( | Vector3< double > & | p, |
| Vector3< double > & | q, | ||
| unsigned int | width, | ||
| unsigned int | height | ||
| ) |
Definition at line 701 of file ProjectionParametersPerspective.cpp.
|
inlinevirtual |
sets the internal parameters from a given KMatrix and updates the cached K and its inverse
Definition at line 500 of file ProjectionParametersPerspective.hh.
References BIAS::KMatrix::Invert(), BIAS::ProjectionParametersBase::SetAspectratio(), and BIAS::ProjectionParametersBase::SetPrincipal().
Referenced by BIAS::EpipolarLine::DrawDistortedLine(), BIAS::glfMatrix::MakeProjectionMatrix(), BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inline |
sets minimum z value of unit-ray in local CCS to be accepted as in front of camera (e.g.
DoesPointProjectIntoImage)
Definition at line 584 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::ImageBlender::CheckFov(), BIAS::ImageBlenderIncremental::CheckFov_(), and BIAS::EpipolarLine::DrawDistortedLine().
|
inlinevirtual |
set from P
Definition at line 511 of file ProjectionParametersPerspective.hh.
References BIAS::PMatrix::GetC(), BIAS::PMatrix::GetK(), and BIAS::PMatrix::GetR().
Referenced by BIAS::TriangleMesh::GenerateDenseMesh(), BIAS::Projection::Load(), and BIAS::Camera< StorageType >::ParseMetaData().
|
inlinevirtualinherited |
Set pose from pose object.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 657 of file ProjectionParametersBase.hh.
Referenced by BIAS::Projection::AddAbsoluteCamera(), BIAS::Projection::CreatePerspective(), BIAS::Projection::CreateSpherical(), BIAS::PlanarRectification< InputStorageType, OutputStorageType >::DetermineRectificationParameters_(), BIAS::Projection::GetParameterCloneWithAbsolutePose(), BIAS::ProjectionParametersSphericalFast::GetPerspectiveCutOutParameters(), BIAS::CylindricDepthPanorama::Init(), BIAS::CylindricDepthTrackingPanorama::ProcessCylindricProjection(), BIAS::GLProjectionParametersPerspective::SetIntrinsics(), BIAS::ProjectionParametersSphericalSimple::SetPose(), and BIAS::PMDWarp::UseProjectiveTexturing().
|
inlinevirtualinherited |
Set pose from pose parametrization.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 529 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersSphericalSimple::SetPoseParametrization().
|
inlinevirtual |
Set principal point in pixels relative to top left corner, virtual overload to recalculate K_.
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 336 of file ProjectionParametersPerspective.hh.
References BIAS::ProjectionParametersBase::SetPrincipal().
Referenced by BIAS::Projection::CreatePerspective(), BIAS::GLProjectionParametersPerspective::DrawWithMatchedParamsAndViewport_(), GetCutOutParameters(), BIAS::ProjectionParametersSphericalFast::GetPerspectiveCutOutParameters(), and BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters().
|
inlinevirtualinherited |
Set orientation from unit quaternion Q.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 644 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersFactory::Create(), BIAS::GLProjectionParametersBase::SetExtrinsics(), and BIAS::ProjectionParametersSphericalSimple::SetQ().
|
inlinevirtualinherited |
Set pose from unit quaternion Q and projection center C.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 652 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters(), BIAS::GLProjectionParametersBase::SetExtrinsics(), and BIAS::ProjectionParametersSphericalSimple::SetQC().
|
inlinevirtualinherited |
Set orientation from rotation matrix R.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 661 of file ProjectionParametersBase.hh.
References BIAS::RMatrixBase::GetQuaternion().
Referenced by BIAS::clfTrimmedICP::Compute(), BIAS::ImageBlender::ComputeCylCamGeometry(), BIAS::ImageBlenderIncremental::ComputeCylCamGeometry_(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::GLProjectionParametersBase::SetExtrinsics(), BIAS::ProjectionParametersSphericalSimple::SetR(), and BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam().
|
inline |
Sets the parameters for a simple perspective camera with imagesize 512x512, focal length 512 (fov = 90 deg.), princ.point (255.5,255.5) and without distortion.
Definition at line 287 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_DEF.
Referenced by BIAS::GLProjectionParametersBase::DrawWithMatchedParamsAndViewport_().
|
inline |
Set the current camera skew factor.
Definition at line 323 of file ProjectionParametersPerspective.hh.
|
inline |
Definition at line 364 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_RADIAL.
Referenced by BIAS::ProjectionParametersFactory::Create(), BIAS::Projection::CreatePerspective(), BIAS::ProjectionParametersSphericalFast::GetPerspectiveCutOutParameters(), BIAS::ProjectionParametersSpherical::GetPerspectiveCutOutParameters(), BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
inline |
Set the lens undistortion parameters.
Definition at line 373 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_DEF.
|
inline |
Set the lens undistortion parameters including the root of the polynomial.
Definition at line 386 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_BROWN.
Referenced by BIAS::Projection::CreatePerspective().
|
inline |
Definition at line 398 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_INVERSE_RAD.
Referenced by BIAS::Projection::CreatePerspective().
|
inline |
Definition at line 416 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_INVRAD3.
Referenced by BIAS::Projection::CreatePerspective().
|
inline |
Definition at line 408 of file ProjectionParametersPerspective.hh.
References BIAS::DISTYPE_RAD3.
Referenced by BIAS::Projection::CreatePerspective().
|
inlineinherited |
Definition at line 89 of file UnscentedTransform.hh.
|
virtualinherited |
Set the camera source type.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 722 of file ProjectionParametersBase.cpp.
|
inlineinherited |
|
virtualinherited |
computes the second order approximation of the transformations of the mean and the associated covariance for the point transformation Transform_().
Implements BIAS::UncertaintyTransformBase.
Definition at line 52 of file UnscentedTransform.cpp.
References BIAS::UnscentedTransform::ComputeSigmaPoints_(), TNT::Matrix< T >::newsize(), TNT::Matrix< T >::num_cols(), TNT::Matrix< T >::num_rows(), BIAS::Vector< T >::OuterProduct(), BIAS::Vector< T >::SetZero(), BIAS::Matrix< T >::SetZero(), BIAS::Vector< T >::Size(), TNT::Vector< T >::size(), BIAS::Matrix< T >::Trace(), and BIAS::UnscentedTransform::Transform_().
Referenced by BIAS::EssentialPoint2Line::Compute(), BIAS::CovEuler2Quaternion::CTransform(), BIAS::Covariance3Dto2D::Project(), BIAS::Covariance3Dto2DHomg::Project(), and BIAS::Cov3Dto2DPoseCertain::Transform().
|
virtualinherited |
Worker function for Unscented Transform.
Implements BIAS::UnscentedTransform.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 472 of file ProjectionParametersBase.cpp.
References TNT::Vector< T >::size().
| int ProjectionParametersPerspective::TransformCartesianToPolarCoordinates | ( | const BIAS::Image< float > & | cartesianDepth, |
| BIAS::Image< float > & | polarDepth | ||
| ) |
transforms an image from cartesian coordinates to polar coordinates
Definition at line 772 of file ProjectionParametersPerspective.cpp.
References BIAS::ImageBase::GetChannelCount(), BIAS::ImageBase::GetHeight(), BIAS::Image< StorageType >::GetImageDataArray(), BIAS::ImageBase::GetWidth(), BIAS::Image< StorageType >::Init(), BIAS::ImageBase::IsEmpty(), and BIAS::ImageBase::ReInit().
Referenced by BIAS::ProjectionParametersPerspectiveDepth::DistortDepth(), BIAS::ProjectionParametersPerspectiveDepth::DistortDepthMapIP(), BIAS::ProjectionParametersPerspectiveDepth::DistortReflectivity(), BIAS::ProjectionParametersPerspectiveDepth::DistortReflectivityDepthIP(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepth(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepthMapIP(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortReflectivity(), and BIAS::ProjectionParametersPerspectiveDepth::UnDistortReflectivityDepthIP().
| float ProjectionParametersPerspective::TransformCartesianToPolarCoordinates | ( | const HomgPoint2D & | pos, |
| const float | depthCartesian | ||
| ) |
transforms a depth value from cartesian coordinates to polar coordinates
Definition at line 808 of file ProjectionParametersPerspective.cpp.
| int ProjectionParametersPerspective::TransformPolarToCartesianCoordinates | ( | const BIAS::Image< float > & | polarDepth, |
| BIAS::Image< float > & | cartesianDepth | ||
| ) |
transforms an image from polar coordinates to cartesian coordinates
Definition at line 826 of file ProjectionParametersPerspective.cpp.
References BIAS::ImageBase::GetChannelCount(), BIAS::ImageBase::GetHeight(), BIAS::Image< StorageType >::GetImageDataArray(), BIAS::ImageBase::GetWidth(), BIAS::Image< StorageType >::Init(), BIAS::ImageBase::IsEmpty(), and BIAS::ImageBase::ReInit().
Referenced by BIAS::ProjectionParametersPerspectiveDepth::DistortDepth(), BIAS::ProjectionParametersPerspectiveDepth::DistortDepthMapIP(), BIAS::ProjectionParametersPerspectiveDepth::DistortReflectivity(), BIAS::ProjectionParametersPerspectiveDepth::DistortReflectivityDepthIP(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepth(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepthMapIP(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortReflectivity(), and BIAS::ProjectionParametersPerspectiveDepth::UnDistortReflectivityDepthIP().
| float ProjectionParametersPerspective::TransformPolarToCartesianCoordinates | ( | const HomgPoint2D & | pos, |
| const float | depthPolar | ||
| ) |
transforms a depth value from polar coodinates to cartesian coordinates
Definition at line 864 of file ProjectionParametersPerspective.cpp.
|
virtual |
Using the Matlab camera calibration toolbox parameters for an undistortion of distorted coordinates.
TODO: faster implementation via Lookup-table
Implements BIAS::ProjectionParametersBase.
Definition at line 345 of file ProjectionParametersPerspective.cpp.
References BIAS::HomgPoint2D::Homogenize(), BIAS::HomgPoint2D::IsAtInfinity(), and BIAS::HomgPoint2D::Set().
Referenced by BIAS::OutputLensDistortion::CreateLookupTable(), and BIAS::DistortionRendering::Init().
|
inlineprotected |
Definition at line 883 of file ProjectionParametersPerspective.hh.
References distType_, BIAS::DISTYPE_BROWN, BIAS::DISTYPE_DEF, BIAS::DISTYPE_INVERSE_RAD, BIAS::DISTYPE_INVRAD3, BIAS::DISTYPE_NONE, BIAS::DISTYPE_RAD3, BIAS::DISTYPE_RADIAL, kc1_, kc2_, kc3_, kc4_, and r0_.
|
virtual |
unprojects the covariance matrices to K=Identity camera Fast implementation for IgnorDistortion = true and Normalize = false
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 912 of file ProjectionParametersPerspective.cpp.
References BIAS::Matrix3x3< T >::Mult(), BIAS::Matrix3x3< T >::Transpose(), and BIAS::ProjectionParametersBase::UnProjectCovLocal().
|
virtual |
calculates the viewing ray from the camera center (in the camera coordinate system) which belongs to the image position pos with lens distortion e.g.
(0,0,1) means optical axis
Implements BIAS::ProjectionParametersBase.
Definition at line 267 of file ProjectionParametersPerspective.cpp.
References BIAS::Equal(), and BIAS::Vector3< T >::NormL2().
Referenced by BIAS::ImageBlender::CheckFov(), BIAS::ImageBlenderIncremental::CheckFov_(), BIAS::Primitives::LocalNormalizedVertexCloud(), BIAS::Primitives::LocalPerspectivePatches(), BIAS::Primitives::LocalPerspectivePatchOverLine(), BIAS::Primitives::LocalPerspectiveQuad(), BIAS::glfMatrix::MakeProjectionMatrix(), BIAS::PMDWarp::SetupDefaultPrimitiveRendering_(), BIAS::MultipleDepthWarp::SetupNViewsWarp(), and BIAS::GLProjectionParametersPerspective::UpdateGLProjectionMatrix_().
|
virtual |
map points from image onto unit diameter image plane in 3D.
Chosen is the image plane with distance of one from the image center.
Implements BIAS::ProjectionParametersBase.
Definition at line 252 of file ProjectionParametersPerspective.cpp.
References BIAS::Equal(), BIAS::HomgPoint3D, and BIAS::Vector3< T >::NormL2().
|
virtualinherited |
calculates a 3D point in the global (not the rig) coordinate system, which belongs to the image position pos with distance depth to the camera center.
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 448 of file ProjectionParametersBase.cpp.
References BIAS::Vector3< T >::AddIP(), and BIAS::Vector3< T >::Mult().
Referenced by BIAS::PMDImageProc::CrossCheck(), BIAS::TriangleMesh::MakeTriangles_(), and BIAS::clfTrimmedICP::setFromDepthMap_().
|
virtualinherited |
Reimplemented in BIAS::ProjectionParametersDynamicLoad.
Definition at line 460 of file ProjectionParametersBase.cpp.
References BIAS::Vector3< T >::AddIP(), BIAS::Vector3< T >::Mult(), and BIAS::ProjectionParametersBase::UnProjectToPointLocal().
|
virtual |
Definition at line 237 of file ProjectionParametersPerspective.cpp.
|
virtualinherited |
calculates a 3D point in the local camera coordinate system, which belongs to the image position pos in cam with distance depth to the camera center cam.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersSpherical, BIAS::ProjectionParametersSphericalFast, BIAS::ProjectionParametersCylindric, BIAS::ProjectionParametersProjective, BIAS::ProjectionParametersOrthographic, and BIAS::ProjectionParametersBufferedRay.
Definition at line 432 of file ProjectionParametersBase.cpp.
References BIAS::Vector3< T >::NormL2().
Referenced by BIAS::ProjectionParametersBase::UnProjectToPoint().
|
inlinevirtualinherited |
Calculates the view ray, which belongs to the given position on the image plane, in global coordinates.
| pos | position on the image plane |
| origin | origin of the ray |
| direction | will be the direction of the ray |
| ignoreDistortion | optional parameter which specifies if potential distortions are ignored (is false by default) |
In case of a perspective projection, the ray goes through the optical center of the projection and the given position on the image plane.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 325 of file ProjectionParametersBase.hh.
References BIAS::Matrix3x3< T >::Mult().
Referenced by BIAS::ImageBlender::BlendImages(), BIAS::ImageBlenderIncremental::BlendImages(), BIAS::ImageBlender::CheckFov(), BIAS::ImageBlenderIncremental::CheckFov_(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::Triangulation::Triangulate(), and BIAS::Triangulation::TriangulateProjective().
|
inlinevirtualinherited |
Calculates the view ray, which belongs to the given position on the image plane, in global coordinates.
| pos | position on the image plane |
| direction | will be the direction of the ray |
| ignoreDistortion | optional parameter which specifies if potential distortions are ignored (is false by default) |
In case of a perspective projection, the ray goes through the optical center of the projection and the given position on the image plane.
Definition at line 351 of file ProjectionParametersBase.hh.
References BIAS::Matrix3x3< T >::Mult().
|
inlinevirtualinherited |
Calculates the view ray, which belongs to the given position on the image plane, using the given projection.
| pos | position on the image plane |
| origin | origin of the ray |
| direction | will be the direction of the ray |
| proj | reference to the projection which is used |
| ignoreDistortion | optional parameter which specifies if potential distortions are ignored (is false by default) |
In case of a perspective projection, the ray goes through the optical center of the given projection and the given position on the image plane.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, and BIAS::ProjectionParametersProjective.
Definition at line 377 of file ProjectionParametersBase.hh.
References BIAS::Matrix3x3< T >::Mult(), and BIAS::ProjectionParametersBase::UnProjectLocal().
| void ProjectionParametersPerspective::UpdateMinZLocal | ( | ) |
run along image border and compute maximum field of view, save in minzlocal
Definition at line 933 of file ProjectionParametersPerspective.cpp.
References BIAS::Equal(), BIAS::HomgPoint2D, BIAS::Vector3< T >::NormL2(), BIAS::PixelIterator::x, and BIAS::PixelIterator::y.
|
inlinevirtualinherited |
Validate currently set pose.
Reimplemented in BIAS::ProjectionParametersDynamicLoad, BIAS::ProjectionParametersProjective, and BIAS::ProjectionParametersSphericalSimple.
Definition at line 687 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersSphericalSimple::ValidatePose().
|
virtual |
compute scalar dissimilarity between two cameras based upon rough approximation of field of view overlap for pure rotation and penalty term for translation: 0=identical
Reimplemented from BIAS::ProjectionParametersBase.
Definition at line 880 of file ProjectionParametersPerspective.cpp.
References BIAS::ProjectionParametersBase::GetC(), BIAS::ProjectionParametersBase::GetR(), and BIAS::Matrix3x3< T >::Normalize().
|
inherited |
call this to add the class to a node of a given xml tree
Definition at line 26 of file XMLBase.cpp.
References BIAS::XMLIO::addAttribute(), and BIAS::XMLIO::addChildNode().
|
virtual |
specialization of XML block name function
Reimplemented from BIAS::ProjectionParametersBase.
Reimplemented in BIAS::ProjectionParametersPerspectiveDepth.
Definition at line 395 of file ProjectionParametersPerspective.cpp.
|
virtual |
specialization of XML read function
Reimplemented from BIAS::ProjectionParametersBase.
Reimplemented in BIAS::ProjectionParametersPerspectiveDepth.
Definition at line 455 of file ProjectionParametersPerspective.cpp.
References BIAS::DISTYPE_BROWN, BIAS::DISTYPE_DEF, BIAS::DISTYPE_INVERSE_RAD, BIAS::DISTYPE_INVRAD3, BIAS::DISTYPE_NONE, BIAS::DISTYPE_RAD3, BIAS::DISTYPE_RADIAL, BIAS::XMLIO::getAttributeByName(), BIAS::XMLIO::getAttributeValueDouble(), BIAS::XMLIO::getAttributeValueString(), BIAS::XMLIO::getChild(), BIAS::ProjectionParametersBase::XMLGetClassName(), and BIAS::ProjectionParametersBase::XMLIn().
Referenced by BIAS::ProjectionParametersPerspectiveDepth::XMLIn().
|
virtual |
specialization of XML write function
Reimplemented from BIAS::ProjectionParametersBase.
Reimplemented in BIAS::ProjectionParametersPerspectiveDepth.
Definition at line 402 of file ProjectionParametersPerspective.cpp.
References BIAS::XMLIO::addAttribute(), BIAS::XMLIO::addChildNode(), BIAS::DISTYPE_BROWN, BIAS::DISTYPE_DEF, BIAS::DISTYPE_INVERSE_RAD, BIAS::DISTYPE_INVRAD3, BIAS::DISTYPE_NONE, BIAS::DISTYPE_RAD3, BIAS::DISTYPE_RADIAL, BIAS::ProjectionParametersBase::XMLGetClassName(), and BIAS::ProjectionParametersBase::XMLOut().
Referenced by BIAS::ProjectionParametersPerspectiveDepth::XMLOut().
|
inherited |
derived classes must implement the function XMLIn which is called by this function XMLRead to read everything with name Filename into (*this).
Definition at line 78 of file XMLBase.cpp.
References BIAS::XMLIO::clear(), BIAS::XMLIO::getAttributeValueDouble(), BIAS::XMLIO::getNodeName(), and BIAS::XMLIO::read().
Referenced by BIAS::biasGLviewerGLUT::Init(), BIAS::SceneOpenSceneGraph::Load(), and BIAS::GLProjectionParametersPerspective::XMLRead().
|
inherited |
reconstruct xml tree from string
Definition at line 111 of file XMLBase.cpp.
References BIAS::XMLIO::clear(), BIAS::XMLIO::getAttributeValueDouble(), BIAS::XMLIO::getNodeName(), and BIAS::XMLIO::ReadFromString().
Referenced by BIAS::IOUtils::GetProjection().
|
inherited |
call this to add the class to a new xml tree and write it to the file Filename.
Calls function XMLOut of derived class
| CompressionLevel | 0..9 (0=off, 9=highest compression) |
Definition at line 40 of file XMLBase.cpp.
References BIAS::XMLIO::addAttribute(), BIAS::XMLIO::clear(), BIAS::XMLIO::create(), BIAS::XMLIO::SetCompression(), BIAS::XMLIO::SetEncoding(), and BIAS::XMLIO::write().
Referenced by BIAS::SphericalDepthPanorama::GetTriangleMesh(), BIAS::SceneOpenSceneGraph::Save(), BIAS::ScreenShotListener::StoreNextScreenShot_(), and BIAS::GLProjectionParametersPerspective::XMLWrite().
|
inherited |
serialize xml tree to string
Definition at line 61 of file XMLBase.cpp.
References BIAS::XMLIO::addAttribute(), BIAS::XMLIO::clear(), BIAS::XMLIO::create(), BIAS::XMLIO::SetEncoding(), and BIAS::XMLIO::WriteToString().
|
friend |
Definition at line 716 of file ProjectionParametersPerspective.hh.
|
protectedinherited |
Definition at line 510 of file Debug.hh.
Referenced by BIAS::Debug::operator=(), and BIAS::ImageBase::operator=().
|
protectedinherited |
new concept, debuglevel are managed here in the debug class
Definition at line 516 of file Debug.hh.
Referenced by BIAS::Debug::operator=().
|
protectedinherited |
Definition at line 517 of file Debug.hh.
Referenced by BIAS::Debug::operator=().
|
staticprotectedinherited |
Definition at line 511 of file Debug.hh.
Referenced by BIAS::Debug::operator=().
|
protectedinherited |
the alpha parameter determines the spread of the sigma points
Definition at line 94 of file UnscentedTransform.hh.
Referenced by BIAS::UnscentedTransform::ComputeSigmaPoints_().
|
protectedinherited |
aspect ratio of the camera CCD
Definition at line 799 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), BIAS::operator<<(), and BIAS::ProjectionParametersBase::operator=().
|
protectedinherited |
beta is used to incorporate prior knowledge of the distribution of x.
For Gaussian distributions beta = 2.0 is optiomal
Definition at line 97 of file UnscentedTransform.hh.
Referenced by BIAS::UnscentedTransform::ComputeSigmaPoints_().
|
protectedinherited |
Definition at line 788 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::DoExtrinsicsDiffer(), BIAS::operator<<(), and BIAS::ProjectionParametersBase::operator=().
|
protected |
Definition at line 692 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
focal length is stored in pixel for cellSizeX
Definition at line 682 of file ProjectionParametersPerspective.hh.
Referenced by DoIntrinsicsDiffer(), and operator=().
|
staticprotectedinherited |
|
protectedinherited |
height of image in pixels
Definition at line 793 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersPerspectiveDepth::DistortDepthMapIP(), BIAS::ProjectionParametersSphericalSimple::DoesPointProjectIntoImageLocal(), BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), GetCutOutParameters(), BIAS::operator<<(), BIAS::ProjectionParametersBase::operator=(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepthMapIP(), and BIAS::ProjectionParametersBufferedRay::UnProjectLocal().
|
protected |
Definition at line 698 of file ProjectionParametersPerspective.hh.
Referenced by operator=().
|
protected |
ideal image size
Definition at line 698 of file ProjectionParametersPerspective.hh.
Referenced by operator=().
|
protectedinherited |
Multifunctional identifier.
Definition at line 806 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::operator=().
|
protected |
Definition at line 679 of file ProjectionParametersPerspective.hh.
Referenced by operator=().
|
protected |
focal length, aspect ratio, principal point in K_, inverse in invK_
Definition at line 679 of file ProjectionParametersPerspective.hh.
Referenced by operator=().
|
protectedinherited |
kappa is a secondary scaling parameter.
In other papers from Uhlman kappa is fixed to 1.0
Definition at line 100 of file UnscentedTransform.hh.
Referenced by BIAS::UnscentedTransform::ComputeSigmaPoints_().
|
protected |
lens undistortion parameters after Bouquet also used as parameters for distortion after Brown(?)
Definition at line 685 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), DoIntrinsicsDiffer(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
Definition at line 685 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), DoIntrinsicsDiffer(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
Definition at line 685 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), DoIntrinsicsDiffer(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
Definition at line 685 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), DoIntrinsicsDiffer(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
rigorously clip unit rays in CCS with z smaller than this values
Definition at line 701 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::operator<<(), and operator=().
|
protectedinherited |
pose
Definition at line 781 of file ProjectionParametersBase.hh.
Referenced by BIAS::operator<<(), BIAS::ProjectionParametersBase::operator=(), BIAS::ProjectionParametersSphericalSimple::SetPose(), BIAS::ProjectionParametersSphericalSimple::SetPoseParametrization(), BIAS::ProjectionParametersSphericalSimple::SetQ(), BIAS::ProjectionParametersSphericalSimple::SetQC(), and BIAS::ProjectionParametersSphericalSimple::UnProjectToImagePlane().
|
protectedinherited |
principal point in pixel coordinates (one for all zoom settings)
Definition at line 796 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), BIAS::operator<<(), and BIAS::ProjectionParametersBase::operator=().
|
protectedinherited |
Definition at line 796 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), BIAS::operator<<(), and BIAS::ProjectionParametersBase::operator=().
|
protectedinherited |
validity flag for orientation and position
Definition at line 788 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersSphericalSimple::Angles2GlobalOrientation(), BIAS::ProjectionParametersBase::DoExtrinsicsDiffer(), BIAS::ProjectionParametersSphericalSimple::GlobalOrientation2Angles(), BIAS::ProjectionParametersSphericalSimple::GlobalOrientation2Pixel(), BIAS::operator<<(), BIAS::ProjectionParametersBase::operator=(), and BIAS::ProjectionParametersSphericalSimple::Pixel2GlobalOrientation().
|
protected |
Definition at line 689 of file ProjectionParametersPerspective.hh.
Referenced by Distort_(), BIAS::operator<<(), operator=(), and Undistort_().
|
protected |
skew calibration parameter
Definition at line 695 of file ProjectionParametersPerspective.hh.
Referenced by BIAS::operator<<(), and operator=().
|
protectedinherited |
Definition at line 102 of file UnscentedTransform.hh.
Referenced by BIAS::UnscentedTransform::ComputeSigmaPoints_().
|
protectedinherited |
Definition at line 803 of file ProjectionParametersBase.hh.
|
protectedinherited |
Definition at line 804 of file ProjectionParametersBase.hh.
|
protectedinherited |
unscented transform worker variables
Definition at line 802 of file ProjectionParametersBase.hh.
|
protectedinherited |
Definition at line 807 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersBase::operator=().
|
protectedinherited |
width of image in pixels
Definition at line 791 of file ProjectionParametersBase.hh.
Referenced by BIAS::ProjectionParametersPerspectiveDepth::DistortDepthMapIP(), BIAS::ProjectionParametersSphericalSimple::DoesPointProjectIntoImageLocal(), BIAS::ProjectionParametersBase::DoIntrinsicsDiffer(), GetCutOutParameters(), BIAS::operator<<(), BIAS::ProjectionParametersBase::operator=(), BIAS::ProjectionParametersSphericalSimple::Rescale(), BIAS::ProjectionParametersPerspectiveDepth::UnDistortDepthMapIP(), and BIAS::ProjectionParametersBufferedRay::UnProjectLocal().
 1.8.5
1.8.5