|
Basic Image AlgorithmS Library
2.8.0
|
|
Basic Image AlgorithmS Library
2.8.0
|
is a 'fixed size' quadratic matrix of dim. More...
#include <Base/Math/Matrix.hh>
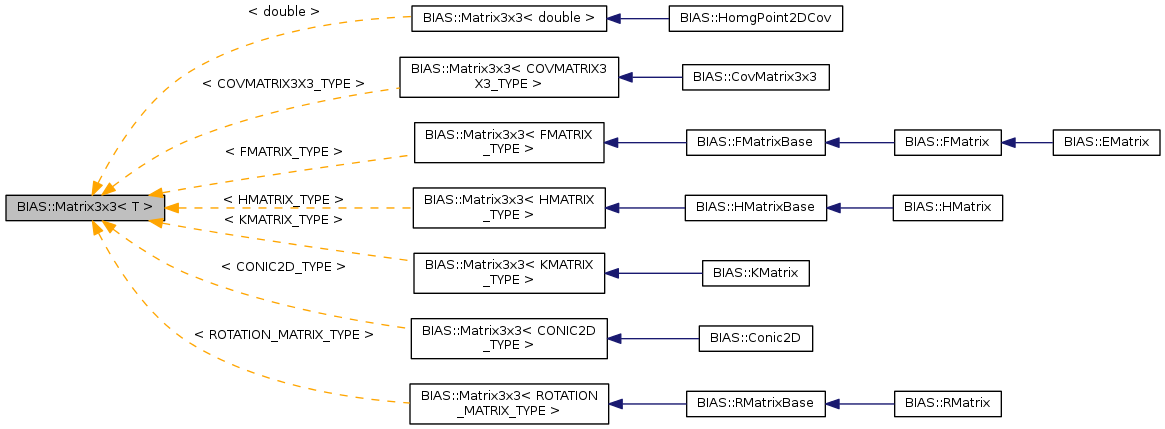
 Inheritance diagram for BIAS::Matrix3x3< T >: Collaboration diagram for BIAS::Matrix3x3< T >:
Inheritance diagram for BIAS::Matrix3x3< T >: Collaboration diagram for BIAS::Matrix3x3< T >:Public Member Functions | |
| void | GetAbsMaxMin (T &max, T &min) const |
| template<> | |
| void | GetAbsMaxMin (double &max, double &min) const |
| template<> | |
| void | GetAbsMaxMin (float &max, float &min) const |
| void | GetColumn (const unsigned int col, Vector3< T > &r) const |
| extract one column ('Spalte') from this matrix (for convenience) More... | |
| BIAS::Vector3< T > | GetColumn (const unsigned int col) const |
| T * | GetData () |
| const T * | GetData () const |
| T | GetDeterminant () const |
| returns the Determinant |A| of this More... | |
| int | GetInverse (Matrix3x3< T > &inv) const |
| Matrix inversion: inverts this and stores resulty in argument inv. More... | |
| template<> | |
| int | GetInverse (Matrix3x3< unsigned int > &x) const |
| T | GetMax () const |
| void | GetMaxMin (T &max, T &min) const |
| return biggest and smallest entry More... | |
| T | GetMin () const |
| unsigned | GetNumElements () const |
| void | GetRow (const unsigned int row, Vector3< T > &r) const |
| extract one row ('Zeile') from ths matrix (for convenience) More... | |
| Vector3< T > | GetRow (const unsigned int row) const |
| int | InvertIP () |
| In place matrix conversion. More... | |
| template<> | |
| int | InvertIP () |
| bool | IsIdentity (const T eps=std::numeric_limits< T >::epsilon()) const |
| bool | IsZero (const T eps=std::numeric_limits< T >::epsilon()) const |
| bool | Load (const std::string &fname) |
| void | MakeSymmetric () |
| Matrix3x3 (const MatrixInitType &i) | |
| init matrix with identity or zero More... | |
| Matrix3x3 (const Matrix3x3< T > &A) | |
| copy constructor More... | |
| Matrix3x3 () | |
| default constructor More... | |
| Matrix3x3 (const T a0, const T a1, const T a2, const T a3, const T a4, const T a5, const T a6, const T a7, const T a8) | |
| constructor from 9 values More... | |
| Matrix3x3 (const Matrix< T > &A) | |
| cast constructor from Matrix More... | |
| Matrix3x3 (const TNT::Matrix< T > &A) | |
| cast constructor from TNT::Matrix More... | |
| void | Mult (const Vector3< T > &argvec, Vector3< T > &destvec) const |
| matrix - vector multiplicate this matrix with Vector3, storing the result in destvec calculates: destvec = (this Matrix) * argvec More... | |
| void | Mult (const Matrix3x3< T > &argmat, Matrix3x3< T > &destmat) const |
| matrix-matrix multiplication with other Matrix3x3, storing the result in destmat calculates: destmat = (this mat) * argmat More... | |
| void | Mult (const Matrix3x4< T > &argmat, Matrix3x4< T > &destmat) const |
| T | Normalize () |
| divide this by biggest absolute entry, returns biggest entry More... | |
| double | NormFrobenius () const |
| T | NormL1 () const |
| double | NormL2 () const |
| bool | operator!= (const Matrix3x3< T > &arg) const |
| Matrix3x3< T > & | operator*= (const Matrix3x3< T > &arg) |
| woelk 11/2007 (c) www.vision-n.de More... | |
| Matrix3x3< T > & | operator*= (const T &arg) |
| woelk 11/2007 (c) www.vision-n.de More... | |
| Matrix3x3< T > & | operator+= (const Matrix3x3< T > &arg) |
| Matrix3x3< T > & | operator-= (const Matrix3x3< T > &arg) |
| Matrix3x3< T > & | operator/= (const T &arg) |
| Matrix3x3< T > & | operator= (const Matrix3x3< T > &mat) |
| assignment operator More... | |
| bool | operator== (const Matrix3x3< T > &arg) const |
| T * | operator[] (const unsigned row) |
| const T * | operator[] (const unsigned row) const |
| bool | Save (const std::string &fname) const |
| void | Scale (const T &scalar, Matrix3x3< T > &destmat) const |
| scalar-matrix multiplication More... | |
| void | SetAsCrossProductMatrix (const Vector3< T > &vec) |
| Sets matrix from vector as cross product matrix of this vector. More... | |
| void | SetAsCrossProductMatrix (const T &x, const T &y, const T &z) |
| Sets matrix from vector as cross product matrix of a vector. More... | |
| template<> | |
| void | SetAsCrossProductMatrix (const unsigned int &, const unsigned int &, const unsigned int &) |
| template<> | |
| void | SetAsCrossProductMatrix (const Vector3< unsigned int > &) |
| void | SetColumn (const unsigned int col, const Vector3< T > &c) |
| void | SetFromColumnVectors (const BIAS::Vector3< T > &v0, const BIAS::Vector3< T > &v1, const BIAS::Vector3< T > &v2) |
| set this matrix from 3 vectors each representating a column More... | |
| void | SetFromRowVectors (const BIAS::Vector3< T > &v0, const BIAS::Vector3< T > &v1, const BIAS::Vector3< T > &v2) |
| set this matrix from 3 vectors, each representating a row More... | |
| void | SetFromVector (const TNT::Vector< T > &vec) |
| sets the diagonalelements of this 3x3 Matrix rowwise with the values of the 9 (x1) vector More... | |
| void | SetIdentity () |
| set the elements of this matrix to the identity matrix (possibly overriding the inherited method) More... | |
| void | SetRow (const unsigned int row, const Vector3< T > &r) |
| void | SetZero () |
| T | Trace () const |
| return the trace of the matrix More... | |
| Matrix3x3< T > | Transpose () const |
| returns transposed matrix tested 12.06.2002 More... | |
| void | Transpose (const Matrix3x3< T > &arg) |
| sets this as transposed arg, fw More... | |
| void | TransposedMult (const Vector3< T > &argvec, Vector3< T > &destvec) const |
| multiplies matrix from left with transposed argvec, resulting in transposed destvec More... | |
| void | TransposeIP () |
| tranpose this matrix "in place" example: 0 1 2 –> 0 3 6 3 4 5 –> 1 4 7 6 7 8 –> 2 5 8 More... | |
| virtual | ~Matrix3x3 () |
| destructor More... | |
Protected Attributes | |
| T | Data_ [9] |
Related Functions | |
(Note that these are not member functions.) | |
| template<class T > | |
| Matrix3x3< T > | operator* (const Matrix3x3< T > &mat, const T &arg) |
| template<class T > | |
| Matrix3x3< T > | operator* (const T &arg, const Matrix3x3< T > &mat) |
| template<class T > | |
| Matrix2x3< T > | operator* (const Matrix2x3< T > &mat, const Matrix3x3< T > &argmat) |
| template<class T > | |
| Matrix3x3< T > | operator* (const Matrix3x3< T > &argL, const Matrix3x3< T > &argR) |
| template<class T > | |
| Matrix3x3< T > | operator+ (const Matrix3x3< T > &left, const Matrix3x3< T > &right) |
| template<class T > | |
| Matrix3x3< T > | operator- (const Matrix3x3< T > &left, const Matrix3x3< T > &right) |
| template<class T > | |
| Matrix3x3< T > | operator/ (const Matrix3x3< T > &mat, const T &arg) |
is a 'fixed size' quadratic matrix of dim.
3 x 3 which is templated over the element-type.
complete rewrite of class with fixed internal memory, to avoid calling of allocator new[]
|
inline |
default constructor
Definition at line 61 of file Matrix3x3.hh.
| BIAS::Matrix3x3< T >::Matrix3x3 | ( | const T | a0, |
| const T | a1, | ||
| const T | a2, | ||
| const T | a3, | ||
| const T | a4, | ||
| const T | a5, | ||
| const T | a6, | ||
| const T | a7, | ||
| const T | a8 | ||
| ) |
constructor from 9 values
Definition at line 46 of file Matrix3x3.cpp.
|
explicit |
init matrix with identity or zero
Definition at line 58 of file Matrix3x3.cpp.
References BIAS::MatrixIdentity, and BIAS::MatrixZero.
| BIAS::Matrix3x3< T >::Matrix3x3 | ( | const Matrix3x3< T > & | A | ) |
copy constructor
Definition at line 76 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::Data_.
| BIAS::Matrix3x3< T >::Matrix3x3 | ( | const Matrix< T > & | A | ) |
cast constructor from Matrix
Definition at line 84 of file Matrix3x3.cpp.
References BIAS::Matrix< T >::GetData(), TNT::Matrix< T >::num_cols(), and TNT::Matrix< T >::num_rows().
| BIAS::Matrix3x3< T >::Matrix3x3 | ( | const TNT::Matrix< T > & | A | ) |
cast constructor from TNT::Matrix
Definition at line 97 of file Matrix3x3.cpp.
References TNT::Matrix< T >::num_cols(), and TNT::Matrix< T >::num_rows().
|
virtual |
destructor
Definition at line 118 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::GetAbsMaxMin | ( | T & | max, |
| T & | min | ||
| ) | const |
Definition at line 669 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< double >::GetAbsMaxMin | ( | double & | max, |
| double & | min | ||
| ) | const |
Definition at line 678 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< float >::GetAbsMaxMin | ( | float & | max, |
| float & | min | ||
| ) | const |
Definition at line 691 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::GetColumn | ( | const unsigned int | col, |
| BIAS::Vector3< T > & | v | ||
| ) | const |
extract one column ('Spalte') from this matrix (for convenience)
Definition at line 299 of file Matrix3x3.cpp.
Referenced by BIAS::PoseParametrizationCovariance::Transform().
|
inline |
Definition at line 202 of file Matrix3x3.hh.
|
inline |
Definition at line 99 of file Matrix3x3.hh.
Referenced by BIAS::HMatrixEstimation::Compute(), BIAS::HMatrixEstimation::ComputeAffine(), BIAS::PMatrixLinear::ComputeCalibrated(), BIAS::clfTrimmedICP::ComputeOptimalMotion_(), BIAS::RMatrix::EnforceConstraints(), BIAS::Matrix3x3< T >::GetInverse(), BIAS::Tensor3D3x3x3< T >::GetMatrices(), BIAS::CovMatrix3x3::GetPCA(), BIAS::CovMatrix3x3::GetS(), BIAS::LoadBogK(), BIAS::LoadBogRC(), BIAS::Matrix2x3< T >::Mult(), BIAS::Matrix3x3< T >::Mult(), BIAS::Matrix3x3< T >::operator*(), BIAS::MatchDataBase::Read(), BIAS::Matrix3x3< T >::Scale(), BIAS::EuclideanTransf3D::Set(), BIAS::AffineTransf::SetAsRotationMatrix(), BIAS::Tensor3D3x3x3< T >::SetFromMatrices(), BIAS::Matrix3x3< T >::Transpose(), BIAS::MatchDataBase::Write(), BIAS::PMatrix::XMLIn(), and BIAS::PMatrix::XMLOut().
|
inline |
Definition at line 103 of file Matrix3x3.hh.
| T BIAS::Matrix3x3< T >::GetDeterminant | ( | ) | const |
returns the Determinant |A| of this
Definition at line 347 of file Matrix3x3.cpp.
Referenced by BIAS::RectificationBase< InputStorageType, OutputStorageType >::CalculateMeanOrientation(), BIAS::PMatrixEstimation::ComputeRotation(), BIAS::Matrix4x4< PMATRIX_TYPE >::det(), BIAS::EMatrix::GetRotationTranslation(), BIAS::PMatrix::Normalize(), BIAS::Quadric3::Optimize(), and BIAS::HomgPlane3D::SetFromPoints().
| int BIAS::Matrix3x3< T >::GetInverse | ( | Matrix3x3< T > & | inv | ) | const |
Matrix inversion: inverts this and stores resulty in argument inv.
Returns -1 if determinant is zero, 0 on success.
Definition at line 373 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::GetData().
Referenced by BIAS::FMatrixBase::Compose(), BIAS::TextureTransformHomography::ComposeWithInverseDeltaP(), BIAS::TextureTransformSimilar::ComposeWithInverseDeltaP(), BIAS::ThreeDOut::ComputePlaneCorners(), BIAS::PMatrixEstimation::ComputeRotationCenter(), BIAS::PMatrix::Decompose_(), BIAS::AffineMapping< InputStorageType, OutputStorageType >::GetBoundingBox(), BIAS::AbsoluteOrientation::GetResidualErrors(), BIAS::HMatrixEstimation::HErrorFunction_(), BIAS::ProjectionParametersBase::IsLeftOf(), BIAS::Quadric3D::Quadric3D(), and BIAS::TrackerBaseAffine2< StorageType >::TrackAffine_().
| int BIAS::Matrix3x3< unsigned int >::GetInverse | ( | Matrix3x3< unsigned int > & | x | ) | const |
Definition at line 362 of file Matrix3x3.cpp.
| T BIAS::Matrix3x3< T >::GetMax | ( | ) | const |
Definition at line 606 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::GetMaxMin | ( | T & | max, |
| T & | min | ||
| ) | const |
return biggest and smallest entry
Definition at line 642 of file Matrix3x3.cpp.
| T BIAS::Matrix3x3< T >::GetMin | ( | ) | const |
Definition at line 624 of file Matrix3x3.cpp.
|
inline |
Definition at line 107 of file Matrix3x3.hh.
| void BIAS::Matrix3x3< T >::GetRow | ( | const unsigned int | row, |
| Vector3< T > & | r | ||
| ) | const |
extract one row ('Zeile') from ths matrix (for convenience)
Definition at line 287 of file Matrix3x3.cpp.
Referenced by BIAS::ThreeDOut::AddEllipsoid(), BIAS::TrifocalTensorBase::Compose(), BIAS::CovMatrix3x3::GetSearchArea(), BIAS::Conic2D::GetSignature(), and BIAS::ThreeDOut::UpdateEllipsoid().
|
inline |
Definition at line 196 of file Matrix3x3.hh.
| int BIAS::Matrix3x3< T >::InvertIP | ( | ) |
In place matrix conversion.
Returns -1 if determinant is zero, 0 on success.
Definition at line 420 of file Matrix3x3.cpp.
Referenced by BIAS::PMatrixBase::Backproject(), BIAS::PMatrix::Compose(), BIAS::clfTrimmedICP::ComputeOptimalMotion_(), BIAS::HMatrix::GetReprojectionError(), and BIAS::Quadric3::Optimize().
| int BIAS::Matrix3x3< unsigned int >::InvertIP | ( | ) |
Definition at line 409 of file Matrix3x3.cpp.
| bool BIAS::Matrix3x3< T >::IsIdentity | ( | const T | eps = std::numeric_limits<T>::epsilon() | ) | const |
Definition at line 518 of file Matrix3x3.cpp.
References BIAS::Equal().
Referenced by BIAS::PMDImageProc::FitDepthTo2DImageHomogr_(), and BIAS::PMDImageProc::FitDepthTo2DImageKOnly_().
| bool BIAS::Matrix3x3< T >::IsZero | ( | const T | eps = std::numeric_limits<T>::epsilon() | ) | const |
Definition at line 508 of file Matrix3x3.cpp.
References BIAS::Equal().
Referenced by BIAS::ThreeDOut::AddEllipsoid(), BIAS::Parametrization::FMatrixToParams(), BIAS::Parametrization::HMatrixToParams(), and BIAS::ThreeDOut::UpdateEllipsoid().
| bool BIAS::Matrix3x3< T >::Load | ( | const std::string & | fname | ) |
Definition at line 546 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::MakeSymmetric | ( | ) |
Definition at line 593 of file Matrix3x3.cpp.
|
inline |
matrix - vector multiplicate this matrix with Vector3, storing the result in destvec calculates: destvec = (this Matrix) * argvec
Definition at line 302 of file Matrix3x3.hh.
Referenced by BIAS::ThreeDOut::AddPMatrix(), BIAS::ProjectionParametersSphericalSimple::Angles2GlobalOrientation(), BIAS::TrifocalTensorBase::CheckPointCorr(), BIAS::TrifocalTensorBase::Compose(), BIAS::PMatrixBase::Compose(), BIAS::FMatrixBase::Compose(), BIAS::PMatrix::Decompose_(), BIAS::FMatrixBase::GetCosAngleErrorHomogenized(), BIAS::TrifocalTensor::GetFMatrix21(), BIAS::TrifocalTensor::GetFMatrix31(), BIAS::GenSynthMatches::GetGTNormalizedF(), BIAS::PMatrix::GetImagePlane(), BIAS::Conic2D::GetLinearizedOffset(), BIAS::TrifocalTensor::GetPMatrix2(), BIAS::TrifocalTensor::GetPMatrix3(), BIAS::PMatrix::GetRayWorldCoo(), BIAS::AbsoluteOrientation::GetResidualErrors(), BIAS::Normalization::Hartley(), BIAS::OnlyRotationControl::LeftMouseDoubleClicked(), BIAS::OnlyRotationControl::LeftMouseMoved(), BIAS::OnlyRotationControl::MiddleMouseMoved(), BIAS::FlyControl::MoveDirection(), BIAS::Vector3< T >::operator*(), BIAS::Matrix3x3< T >::operator*(), BIAS::Matrix3x4< T >::operator*(), BIAS::Matrix3x3< ROTATION_MATRIX_TYPE >::operator*=(), BIAS::Quadric3::Optimize(), BIAS::ProjectionParametersSphericalSimple::Pixel2GlobalOrientation(), BIAS::OnlyRotationControl::RightMouseMoved(), BIAS::FMatrixBase::Set(), BIAS::ProjectionParametersPerspective::UnProjectCovLocal(), BIAS::ProjectionParametersBase::UnProjectToRay(), and BIAS::Normalization::Woelk().
|
inline |
matrix-matrix multiplication with other Matrix3x3, storing the result in destmat calculates: destmat = (this mat) * argmat
Definition at line 344 of file Matrix3x3.hh.
References BIAS::Matrix3x3< T >::GetData().
| void BIAS::Matrix3x3< T >::Mult | ( | const Matrix3x4< T > & | argmat, |
| Matrix3x4< T > & | destmat | ||
| ) | const |
Definition at line 459 of file Matrix3x3.cpp.
References BIAS::Matrix< T >::GetData().
| T BIAS::Matrix3x3< T >::Normalize | ( | ) |
divide this by biggest absolute entry, returns biggest entry
Definition at line 580 of file Matrix3x3.cpp.
Referenced by BIAS::FMatrixEstimation::Optimize(), and BIAS::ProjectionParametersPerspective::ViewDifference().
|
inline |
Definition at line 446 of file Matrix3x3.hh.
Referenced by BIAS::PMatrixEstimation::ComputeRotation(), BIAS::Conic2D::GetDualConic(), BIAS::Conic2D::GetLines(), BIAS::EMatrix::InitFromF(), BIAS::Conic2D::IntersectConicProper(), and BIAS::Parametrization::ParamsToEMatrix().
|
inline |
Definition at line 457 of file Matrix3x3.hh.
|
inline |
Definition at line 255 of file Matrix3x3.hh.
Referenced by BIAS::Conic2D::GetLines().
|
inline |
Definition at line 274 of file Matrix3x3.hh.
|
inline |
woelk 11/2007 (c) www.vision-n.de
Definition at line 143 of file Matrix3x3.hh.
| Matrix3x3< T > & BIAS::Matrix3x3< T >::operator*= | ( | const T & | arg | ) |
woelk 11/2007 (c) www.vision-n.de
Definition at line 144 of file Matrix3x3.cpp.
| Matrix3x3< T > & BIAS::Matrix3x3< T >::operator+= | ( | const Matrix3x3< T > & | arg | ) |
Definition at line 124 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::Data_.
| Matrix3x3< T > & BIAS::Matrix3x3< T >::operator-= | ( | const Matrix3x3< T > & | arg | ) |
Definition at line 134 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::Data_.
| Matrix3x3< T > & BIAS::Matrix3x3< T >::operator/= | ( | const T & | arg | ) |
Definition at line 155 of file Matrix3x3.cpp.
References BIAS::Equal().
| Matrix3x3< T > & BIAS::Matrix3x3< T >::operator= | ( | const Matrix3x3< T > & | mat | ) |
assignment operator
Definition at line 704 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::Data_.
Referenced by BIAS::Conic2D::Conic2D(), BIAS::CovMatrix3x3::operator=(), BIAS::EMatrix::operator=(), BIAS::HMatrixBase::operator=(), BIAS::FMatrix::operator=(), BIAS::FMatrixBase::operator=(), and BIAS::Conic2D::operator=().
| bool BIAS::Matrix3x3< T >::operator== | ( | const Matrix3x3< T > & | arg | ) | const |
Definition at line 536 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::Data_, and BIAS::Equal().
|
inline |
Definition at line 91 of file Matrix3x3.hh.
|
inline |
Definition at line 95 of file Matrix3x3.hh.
| bool BIAS::Matrix3x3< T >::Save | ( | const std::string & | fname | ) | const |
Definition at line 563 of file Matrix3x3.cpp.
|
inline |
scalar-matrix multiplication
Definition at line 374 of file Matrix3x3.hh.
References BIAS::Matrix3x3< T >::GetData().
Referenced by BIAS::Parametrization::FMatrixToParams().
| void BIAS::Matrix3x3< T >::SetAsCrossProductMatrix | ( | const Vector3< T > & | vec | ) |
Sets matrix from vector as cross product matrix of this vector.
Definition at line 275 of file Matrix3x3.cpp.
Referenced by BIAS::TrifocalTensorBase::CheckPointCorr(), BIAS::FMatrixBase::Compose(), BIAS::PMatrixEstimation::ComputeRotation(), BIAS::PMatrixEstimation::ComputeRotationCenter(), BIAS::FMatrix::DecomposetoSR(), BIAS::EParametrization::GetEssentialMatrix(), BIAS::Conic2D::GetTangentPoints(), and BIAS::FMatrixBase::Set().
| void BIAS::Matrix3x3< T >::SetAsCrossProductMatrix | ( | const T & | x, |
| const T & | y, | ||
| const T & | z | ||
| ) |
Sets matrix from vector as cross product matrix of a vector.
with components (x, y, z)
Definition at line 254 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< unsigned int >::SetAsCrossProductMatrix | ( | const unsigned int & | , |
| const unsigned int & | , | ||
| const unsigned int & | |||
| ) |
Definition at line 244 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< unsigned int >::SetAsCrossProductMatrix | ( | const Vector3< unsigned int > & | ) |
Definition at line 266 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::SetColumn | ( | const unsigned int | col, |
| const Vector3< T > & | c | ||
| ) |
Definition at line 323 of file Matrix3x3.cpp.
Referenced by BIAS::PoseParametrizationCovariance::Transform().
| void BIAS::Matrix3x3< T >::SetFromColumnVectors | ( | const BIAS::Vector3< T > & | v0, |
| const BIAS::Vector3< T > & | v1, | ||
| const BIAS::Vector3< T > & | v2 | ||
| ) |
set this matrix from 3 vectors each representating a column
Definition at line 208 of file Matrix3x3.cpp.
Referenced by BIAS::CamPoseCalib::GuessInitialCam_().
| void BIAS::Matrix3x3< T >::SetFromRowVectors | ( | const BIAS::Vector3< T > & | v0, |
| const BIAS::Vector3< T > & | v1, | ||
| const BIAS::Vector3< T > & | v2 | ||
| ) |
set this matrix from 3 vectors, each representating a row
Definition at line 226 of file Matrix3x3.cpp.
| void BIAS::Matrix3x3< T >::SetFromVector | ( | const TNT::Vector< T > & | vec | ) |
sets the diagonalelements of this 3x3 Matrix rowwise with the values of the 9 (x1) vector
Definition at line 190 of file Matrix3x3.cpp.
References TNT::Vector< T >::size().
|
inline |
set the elements of this matrix to the identity matrix (possibly overriding the inherited method)
Definition at line 429 of file Matrix3x3.hh.
Referenced by BIAS::PMatrixEstimation::AutoCalib_(), BIAS::PMatrix::BBCIn(), BIAS::PMatrixBase::Compose(), BIAS::HMatrixEstimation::ComputeAffine(), BIAS::PMatrixLinear::ComputeCalibrated(), BIAS::Triangulation::CorrectCorrespondences(), BIAS::GeometryGL::CreateTextureMatrix(), BIAS::CamPoseCalib::Estimate(), BIAS::HomographyMapping< InputStorageType, OutputStorageType >::GetChangedHomography(), BIAS::ProjectionParametersBase::GetFakeKMatrix(), BIAS::ProjectionParametersPerspective::GetIdealK(), BIAS::CameraParam::GetKMatrix(), BIAS::CamPoseCalib::GetP(), BIAS::CamPoseCalib::GuessInitialCam_(), BIAS::Normalization::Hartley(), BIAS::ProjectionError::Init(), BIAS::KMatrix::Invert(), BIAS::PMDImageProc::KFromMeta(), BIAS::LoadBogK(), BIAS::ProjectionMapping< InputStorageType, OutputStorageType >::ProjectionMapping(), BIAS::ProjectionParametersIO::ReadFromBBCStream(), BIAS::CamPoseCalib::Reset(), BIAS::RMatrixBase::Set(), BIAS::Conic2D::SetEllipse(), BIAS::TrackballControl::SetGLProjectionParametersInterface(), and BIAS::GLProjectionParametersPerspective::SetSimplePerspectiveCam().
| void BIAS::Matrix3x3< T >::SetRow | ( | const unsigned int | row, |
| const Vector3< T > & | r | ||
| ) |
Definition at line 311 of file Matrix3x3.cpp.
|
inline |
Definition at line 294 of file Matrix3x3.hh.
Referenced by BIAS::HMatrixEstimation::Compute(), BIAS::clfTrimmedICP::ComputeOptimalMotion_(), BIAS::PMatrix::Decompose_(), BIAS::Triangulation::GetCovariance(), BIAS::Triangulation::GetCovariance2D(), BIAS::Triangulation::GetCovarianceAnalytic(), BIAS::Tensor3D3x3x3< T >::LeftContravariantContraction2(), BIAS::Tensor3D3x3x3< T >::LeftContravariantContraction3(), BIAS::LoadBogRC(), BIAS::Quadric3D::Quadric3D(), and BIAS::MatchDataBase::Reset().
|
inline |
return the trace of the matrix
Definition at line 230 of file Matrix3x3.hh.
| Matrix3x3< T > BIAS::Matrix3x3< T >::Transpose | ( | ) | const |
returns transposed matrix tested 12.06.2002
Definition at line 167 of file Matrix3x3.cpp.
References BIAS::Matrix3x3< T >::GetData().
Referenced by BIAS::ThreeDOut::AddEllipsoid(), BIAS::ThreeDOut::AddPMatrix(), BIAS::PMatrixEstimation::AutoCalib_(), BIAS::DPPanTiltControlExtended::CompensateHeliMovement(), BIAS::TrifocalTensorBase::Compose(), BIAS::FMatrixBase::Compose(), BIAS::PMatrixEstimation::ComputeFromFDirect(), BIAS::FMatrixEstimation::ComputeNormFParam(), BIAS::PMatrixEstimation::ComputeRotation(), BIAS::PMatrixEstimation::ComputeRotationCenter(), BIAS::Triangulation::CorrectCorrespondences(), BIAS::EpipolarLine::DrawDistortedLine(), BIAS::CamPoseCalib::Estimate(), BIAS::RotationAveraging::GeodesicL1Mean(), BIAS::RotationAveraging::GeodesicL2Mean(), BIAS::GenSynthMatches::GetGTNormalizedF(), BIAS::Conic2D::GetLines(), BIAS::TrifocalTensor::GetPMatrix3(), BIAS::AbsoluteOrientation::GetResidualErrors(), BIAS::CamPoseCalib::GetRotation(), BIAS::EMatrix::GetRotationTranslation(), BIAS::CamPoseCalib::GuessInitialCam_(), BIAS::PMDImageProc::HFromMeta_(), BIAS::HomgPoint2DCov::Homogenize(), BIAS::EMatrix::InitFromF(), BIAS::FMatrixEstimation::Linear(), BIAS::glfMatrix::MakeViewMatrix(), BIAS::HMatrix::MapAcrossPlane(), BIAS::HomgPoint2DCov::Normalize(), BIAS::Vector3< T >::Normalize(), BIAS::FMatrixBase::Set(), BIAS::CamPoseCalib::SetInitialCamera(), BIAS::GenSynthMatchesRig::Setup_(), BIAS::FMatrixEstimation::SevenPoint(), BIAS::CamPoseCalib::SolveLM_(), BIAS::CamPoseCalib::TransformVec(), BIAS::ProjectionParametersPerspective::UnProjectCovLocal(), BIAS::Projection::UnProjectToRayLocal(), BIAS::ThreeDOut::UpdateEllipsoid(), BIAS::GLProjectionParametersBase::UpdateGLModelViewMatrix_(), and BIAS::CoordinateTransform3D::UpdateMatrix_().
|
inline |
sets this as transposed arg, fw
Definition at line 410 of file Matrix3x3.hh.
References BIAS::Matrix3x3< T >::GetData().
|
inline |
multiplies matrix from left with transposed argvec, resulting in transposed destvec
Definition at line 323 of file Matrix3x3.hh.
Referenced by BIAS::Triangulation::CorrectCorrespondences(), BIAS::ProjectionParametersSphericalSimple::GlobalOrientation2Angles(), and BIAS::ProjectionParametersSphericalSimple::GlobalOrientation2Pixel().
|
inline |
tranpose this matrix "in place" example: 0 1 2 –> 0 3 6 3 4 5 –> 1 4 7 6 7 8 –> 2 5 8
Definition at line 385 of file Matrix3x3.hh.
Referenced by BIAS::PMatrixBase::Compose(), BIAS::PMatrix::GetIntersectionOfImagePlanes(), BIAS::EMatrix::GetRotationTranslation(), and BIAS::GenSynthMatchesRig::Setup_().
Definition at line 479 of file Matrix3x3.hh.
Definition at line 484 of file Matrix3x3.hh.
|
related |
untested
Definition at line 811 of file Operators.hh.
References BIAS::Matrix3x3< T >::GetData(), and BIAS::Matrix< T >::GetData().
|
related |
matrix-matrix multiplication using 'Mult'
Definition at line 853 of file Operators.hh.
References BIAS::Matrix3x3< T >::Mult().
|
related |
Definition at line 864 of file Operators.hh.
|
related |
Definition at line 870 of file Operators.hh.
Definition at line 474 of file Matrix3x3.hh.
|
protected |
Definition at line 282 of file Matrix3x3.hh.
Referenced by BIAS::Matrix3x3< T >::Matrix3x3(), BIAS::Matrix3x3< T >::operator+=(), BIAS::Matrix3x3< T >::operator-=(), BIAS::Matrix3x3< T >::operator=(), and BIAS::Matrix3x3< T >::operator==().
 1.8.5
1.8.5