|
Basic Image AlgorithmS Library
2.8.0
|
|
Basic Image AlgorithmS Library
2.8.0
|
stores data for drawing a the extrinisc parameters of a projection. More...
#include <Utils/ThreeDOut.hh>
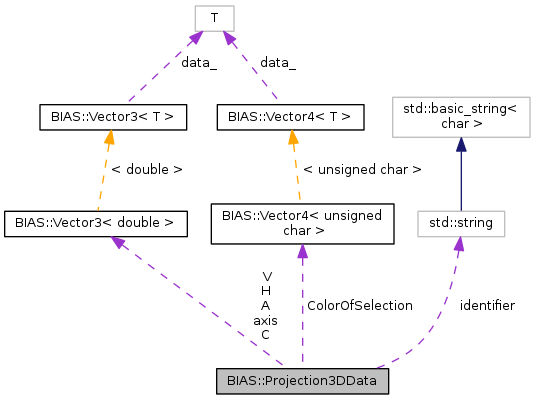
 Collaboration diagram for BIAS::Projection3DData:
Collaboration diagram for BIAS::Projection3DData:Public Member Functions | |
| Projection3DData () | |
| void | Set (const BIAS::PoseParametrization &p, const double scale=1.0) |
| void | Set (const BIAS::Projection &p, const double scale=1.0) |
| void | Set (const BIAS::ProjectionParametersBase &p, const double scale=1.0) |
| Only use this if you have a single camera or a Projection with absolute Transformations of your cameras It does not handle relative Transformations between first and successive cameras. More... | |
| void | Set (const BIAS::Vector3< double > &C, const BIAS::RMatrixBase &R, const double scale=1.0) |
Public Attributes | |
| Vector3< double > | A |
| double | angle |
| Vector3< double > | axis |
| Vector3< double > | C |
| BIAS::RGBAuc | ColorOfSelection |
| Vector3< double > | H |
| std::string | identifier |
| double | radiusSelection |
| double | ratio |
| double | scale |
| int | type |
| Vector3< double > | V |
stores data for drawing a the extrinisc parameters of a projection.
Definition at line 92 of file ThreeDOut.hh.
|
inline |
Definition at line 157 of file ThreeDOut.hh.
|
inline |
Definition at line 94 of file ThreeDOut.hh.
References BIAS::PoseParametrization::GetOrientation(), BIAS::PoseParametrization::GetPosition(), and BIAS::RMatrixBase::SetFromQuaternion().
Referenced by BIAS::ThreeDOut::AddPose(), and BIAS::ThreeDOut::AddProjection().
|
inline |
this only works for projections with only one camera defined
extend it to iterate over all cameras ore use Set(const BIAS::ProjectionParametersBase& p,...)
Definition at line 110 of file ThreeDOut.hh.
References BIAS::Projection::GetC(), BIAS::Projection::GetIdentifier(), BIAS::ProjectionParametersBase::GetImageSize(), BIAS::Projection::GetParameters(), and BIAS::Projection::GetR().
|
inline |
Only use this if you have a single camera or a Projection with absolute Transformations of your cameras It does not handle relative Transformations between first and successive cameras.
Definition at line 128 of file ThreeDOut.hh.
References BIAS::ProjectionParametersBase::GetC(), BIAS::ProjectionParametersBase::GetImageSize(), and BIAS::ProjectionParametersBase::GetR().
|
inline |
Definition at line 141 of file ThreeDOut.hh.
References BIAS::RMatrixBase::GetRotationAxisAngle().
| Vector3<double> BIAS::Projection3DData::A |
Definition at line 159 of file ThreeDOut.hh.
| double BIAS::Projection3DData::angle |
Definition at line 163 of file ThreeDOut.hh.
| Vector3<double> BIAS::Projection3DData::axis |
Definition at line 162 of file ThreeDOut.hh.
| Vector3<double> BIAS::Projection3DData::C |
Definition at line 158 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddProjection().
| BIAS::RGBAuc BIAS::Projection3DData::ColorOfSelection |
Definition at line 176 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddPose(), and BIAS::ThreeDOut::AddProjection().
| Vector3<double> BIAS::Projection3DData::H |
Definition at line 160 of file ThreeDOut.hh.
| std::string BIAS::Projection3DData::identifier |
Definition at line 177 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddProjection().
| double BIAS::Projection3DData::radiusSelection |
Definition at line 167 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddPose(), and BIAS::ThreeDOut::AddProjection().
| double BIAS::Projection3DData::ratio |
Definition at line 165 of file ThreeDOut.hh.
| double BIAS::Projection3DData::scale |
Definition at line 174 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddProjection().
| int BIAS::Projection3DData::type |
Definition at line 172 of file ThreeDOut.hh.
Referenced by BIAS::ThreeDOut::AddPose(), and BIAS::ThreeDOut::AddProjection().
| Vector3<double> BIAS::Projection3DData::V |
Definition at line 161 of file ThreeDOut.hh.
 1.8.5
1.8.5